
0 引言
隨著信息處理技術和微電子等精密技術的蓬勃發展,對供電系統質量和可靠性的要求也越來越高,在一些用電質量要求較高的場合,急需一種電壓穩定、能同步跟蹤電網頻率、高可靠性的交流不間斷電源。UPS系英文Uninterruptible Power System的縮寫,中文意思是“不間斷電源系統”。UPS使供電系統的可靠性和質量大大提高,同時使投資和運行費用降低,是信息時代不可缺少的能源系統。在很多由于計算機系統停電而使計算機丟失數據的行業,UPS起著不可替代的作用,如銀行、證券、通信、航空管理、生產監控系統等。
1 系統結構及工作原理
不間斷電源的種類很多,按不同的結構和功能可以分為在線式UPS、在線互動式UPS、后備式正弦波UPS、后備式方波輸出UPS和Delta變換型UPS。從性能指標上看,在線式UPS>Delta變換型UPS>在線互動式UPS>后備式正弦波輸出UPS>后備式方波輸出UPS。從價格上看,在線式UPS、Delta變換型UPS和在線互動式UPS價格較高,后備式UPS便宜。
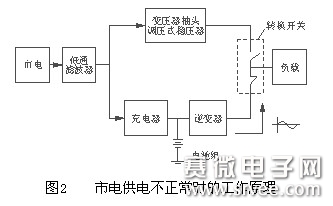
本系統采用的是后備式正弦波UPS,它適用于用電質量不高又要求不能斷電的負載。它由充電器、逆變器、蓄電池組、靜態開關等組成。系統工作原理如圖1和圖2所示。
當市電供電正常時如圖1所示,連接逆變器的轉換開關關斷,連接電網的轉換開關開通,UPS將原來電壓起伏很大的市電經過一種簡易的交流穩壓器稍加穩壓處理后,向用戶負載供電。同時經充電器對蓄電池組充電。

當市電供電不正常時如圖2所示,連接電網的轉換開關關斷,連接逆變器的轉換開關開通,逆變器在蓄電池組所提供的直流能源支持下,向用戶提供50Hz、220V正弦波交流穩壓電源,同時充電器停止工作。
2 控制策略
2.1 UPS逆變器輸出電壓與電網電壓鎖相同步的實現
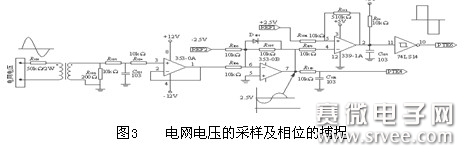
在市電故障時,為避免UPS的逆變器和市電電源切換瞬間對負載造成大的電流沖擊,必須保證電網電壓與UPS逆變器輸出電壓同頻、同相和同幅值,本系統通過MR16單片機對電網電壓采樣及相位捕捉,并與建立的電網電壓正弦表格相比較,經邏輯判斷后控制逆變器輸出電壓的幅值和相位,從而實現與電網電壓的同步。如圖3所示,電網電壓的正弦波信號經變壓器降壓再經-2.5V基準電壓的提升,與+2.5V基準電壓進行比較,在LM339的輸出端經反向器后在PTE6口就可以得到與正弦波同頻、同相位的方波信號,方波的上升沿為正弦波的零相位處,下降沿為正弦波的180°相位處,方波信號送到單片機的I/O口,單片機通過對I/O的檢測就可以判斷電網電壓的相位。通過計算兩次上升沿的時間間隔就可算出電網周期。UPS逆變器正弦波的產生,是通過在MR16單片機的ROM中建立一個正弦表,在中斷程序中,由正弦指針讀取正弦值進行脈寬計算,從而產生SPWM波形輸出,正弦指針為零時對應的正弦波輸出電壓也為零,所以,當檢測到電網零相位點時,可以考慮通過比較正弦指針的值來判斷是否鎖相,指針為零則表明逆變器正弦波輸出與電網電壓波形鎖相同步,否則就要通過移相跟蹤電網電壓相位實現鎖相。
2.2 UPS逆變器與電網切換控制的實現
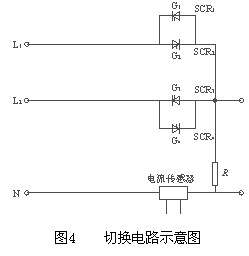
切換控制是通過通斷切換電路中的靜態電子開關(如晶閘管模塊MTC)來實現的。本系統選用MTC70(70A/1200V)的晶閘管,如圖4所示,圖4中L1為電網進線,L2為逆變器進線,N為兩者的公共地線,R為負載。圖中采用晶閘管反并聯連接,由于母線上流過的是正弦全波,以SCR1及SCR2為例,就必然形成在正弦波的正半周SCR2導通、SCR1關斷,在負半周則SCR1導通、SCR2關斷,這樣就保證了流過負載的電流是完整的正弦波。
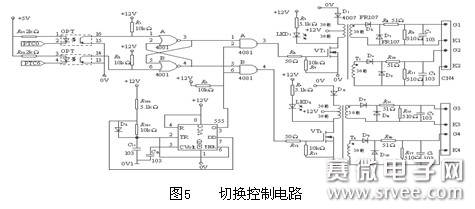
晶閘管的通斷是由MR16單片機輔以切換控制電路實現的。當電網故障時,先發出切斷電網信號,再發出切入逆變器的信號;當電網恢復時,先發出切斷逆變器信號,再發出切入電網的信號,這就需要信號發送電路,同時控制晶閘管開、關也需要門極觸發驅動電路。切換控制電路如圖5所示,圖5中左邊PTC0、PTC6兩路端口就是MR16單片機發送的開關控制信號,經光耦隔離送到由或非門組成的基本RS觸發器電路中,RS觸發器輸出的兩路信號是互鎖的,兩者只能同時為低電平(關斷信號),不能同時為高電平(開通信號),從而增強了系統的安全性。由555定時器組成的自激振蕩器的作用是定時地發送觸發脈沖,脈沖有效寬度應不小于晶閘管的開通時間,其輸出信號與RS觸發器的輸出相與送到門極驅動電路中。圖5中后級則是晶閘管的門極脈沖驅動電路,可以看出也是隔離輸出的。另外,采用兩個LED管用于顯示負載采用的供電方式。
MR16單片機通過對市電故障及故障是否恢復的判斷來切斷市電或UPS的逆變器。切斷市電或逆變器后,負載電流衰減到零需要有一過程,然后再切入逆變器或市電,為保證切換操作的可靠性,本系統在零電流切入方式的基礎上,在主程序中加入了如果在切斷市電(或逆變器)后延時3ms沒有進行切入操作,就不管是否檢測到零電流直接進行相應的切入操作,從而保證了UPS供電的可靠性。
2.3 UPS逆變器輸出電壓的平均值反饋控制
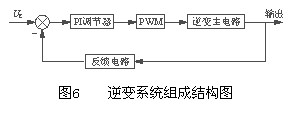
UPS逆變系統實質上也是一種控制系統,對于本系統輸出電壓來說,其擾動量主要是負載變化和蓄電池的電壓變化,蓄電池電壓在短時間內可以視為定值,負載的變化為本系統的主擾動。根據反饋控制原理,要維持哪一個物理量基本不變就應該引入哪個物理量的負反饋,所以,閉環逆變系統采用的是電壓閉環控制。通過測量輸出反饋的電壓量與給定量進行比較,經過調節器控制計算輸出,最終改變SPWM輸出脈寬,從而使輸出跟隨給定變化,負載擾動是被負反饋包圍在前向通道上的,所以,該控制結構能夠抵抗負載擾動變化。對于調節器來說,數字化PI調節器是目前應用最廣泛、最為成熟的一項技術,已經在逆變系統中得到了很好的應用。由于逆變系統中的負載擾動均為電參量,動態響應要快,因此,PI控制算法中的參數選擇至關重要,在設計過程中應合理選擇調節器參數,使系統的控制適應性、快速性好,并有較強的魯棒性。
逆變系統的一般組成結構如圖6所示。
2.4 UPS逆變器輸出電壓波形的補償
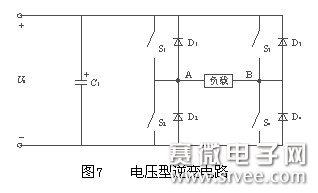
在逆變主電路(如圖7所示)中,為防止同一橋臂的兩個功率開關管出現直通現象,往往采取關斷一功率管后延時一段時間再開通另一功率管的方法,這中間延時的時間(通常為幾μs)就形成了死區,死區的存在(盡管很小)勢必會造成輸出電壓波形的畸變,尤其對零點附近波形的影響,本系統采取優化存儲在MR16單片機ROM中的正弦表值的方法對死區進行補償,以實現平滑的正弦電壓波形輸出。
2.5 UPS逆變器的驅動模式
本系統中,4個主功率開關器件采用的是單極性倍頻工作方式而不是雙極性方式,因為與雙極性相比,單極性倍頻方式具有等效“加倍”開關頻率的優點,開關頻率的“加倍”體現在輸出電壓波形的頻譜中。若選擇頻率調制比為偶數,則最低次諧波將出現在二倍于開關頻率的邊帶上。
3 軟件設計
系統軟件主要分為主程序和中斷服務子程序兩部分。主程序由初始化模塊、開機延時模塊、采樣保護模塊、調節器模塊等幾個部分組成,另外主程序中還有對一些數據進行處理程序以及前面切換部分所述的超時切換程序,數據處理程序包括為了節省中斷資源,對中斷中AD采樣的數據的處理計算和對通信接收數據的處理。
中斷程序模塊的任務是完成SPWM波形的發出,完成電壓、電流和溫度等各項數據的AD采樣,與市電電壓的鎖相同步并進行切換操作的控制。由于中斷資源有限(每100μs中斷一次,中斷程序執行時間不能超過100μs),對各參數的AD采樣不可能每次中斷都要完成一次,所以除重要參數外(輸出電壓和電網電壓),其他參數都采用每兩次中斷采樣一次的方法。
4 實驗結果
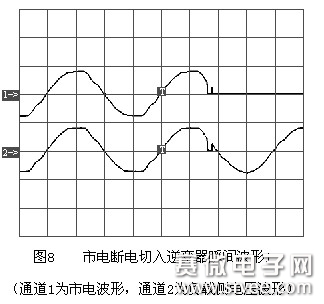
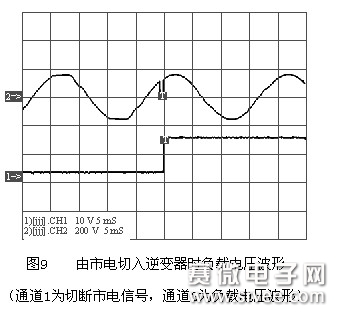
圖8為市電斷電切入UPS逆變器瞬間波形。圖9為由市電切入逆變器時負載電壓波形。
5 結語
本文所介紹的全數字化后備式UPS采用MOTOROLA單片機MC68HC908MR16作為主控芯片,能夠做到快速鎖相和快速切換,基本對負載無影響。系統結構緊湊,可靠性高,而且成本低,調試方便,充分體現了數字控制的優勢。