
摘要:設計了一種專門用于物探測量且經濟實用的GPS接收機。該接收機采用TI公司的TMS320F2812芯片為核心處理器,對GPS-OEM板進行二次開發,給出了詳細的軟硬件設計思路和實現方案。測試結果表明,在天氣情況良好的條件下,單機定位精度小于1 m,能夠滿足大多數物探平面測量精度要求。
關鍵詞:地球物理勘探測量;GPS-OEM;TMS320F2812;GPS接收機
0 引言
地球物理勘探野外工作在進行地球物理場測量的同時,需進行點位及其高程測量。GPS定位技術與常規測量技術相比,具有觀測站間無需通視、速度快、測量組人員投入少等優勢,已成為物探測地工作首選。
地球物理勘探測量中,要求平面定位精度小于3 m。目前,市場上低價格GPS接收機的精度不能保障;高精度GPS接收機可滿足精度要求,但價格昂貴。為滿足地球物理勘探測地需求,地球物理勘探者往往必須選用高精度GPS接收機,顯然增加了測地工作的成本。針對目前GPS接收機發展現狀,本文旨在研制一種專用GPS接收機,要求價格適中、能實時定位、且在短時間內單機定位精度能達到1~3 m,滿足大多數地球物理勘探測地精度需求。
數字信號處理器DSP運算速度高,有較高的數字信號處理能力,高可靠性的特點,非常適于GPS實時信號的處理。利用GPS-OEM進行二次開發,設計相應接口軟件、適配顯示器、鍵盤等用戶終端與控制處理器,構成GPS一體化接收機,已成為一種發展趨勢。通過調研,選用一種GPS-OEM板,與一種蝶形接收天線配合使用時,單機定位精度能達到1m左右,為進一步設計提供了基本依據。
1 系統硬件設計
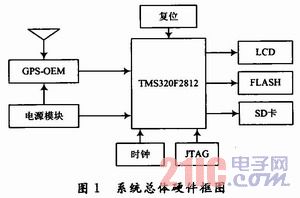
該接收機由GPS數據接收單元、核心處理單元、及存儲和顯示單元三部分組成。其中,GPS數據接收部分采用選定的GPS-OEM板設計,核心處理單元采用TI公司的DSP,接口部分主要由轉換芯片及相應軟件組成。所設計的系統總體硬件框架如圖1所示。
1.1 GPS數據接收模塊設計
目前在市場上GPS-OEM模塊種類較多,在選型時要根據:
(1)設計系統所能達到的定位精度;
(2)數據鏈路的通訊方式和覆蓋范圍;
(3)性能價格比等因素來選擇合適的OEM模塊。
經權衡比較,設計采用合眾思壯公司在2006年正式推出的一款GPS-OEM模塊新月-HC12A。該模塊是合眾思壯公司生產的一款單頻12通道接收機,采用了最新的ASIC芯片和Coast等專利軟件算法,同時具有20Hz的原始數據、定位數據更新率,信標接收功能,差分基準站/移動站,L-Dif,E-Dif,1 pps/Event Marker等多種功能,其單機定位誤差小于2.5 m(2DRMS),代表了當前GPS行業的最新技術趨勢。
新月-HC12A模塊主要由低噪聲下變頻器、信號通道、微處理器、存儲器等組成,其內部結構如圖2所示。
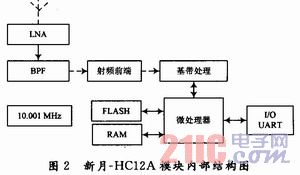
另外,根據天線的供電電壓、信噪比(噪聲系數1.5 dB左右)及增益(增益28 dB左右),選用了右旋極化陶瓷介質天線,該GPS信號接收天線具有在同一時刻觀測到較多GPS衛星數、快速定位的特點。
1.2 DSP核心處理模塊設計
為滿足接收機系統具備定位速度快,可靠性高及實時性的要求,選用DSP芯片作為中央處理單元的核心,根據中央處理單元對運算量的需求數據本身結構(要求處理的有效數字最大為11位),綜合考慮DSP芯片的運算速度、運算精度、DSP芯片的硬件資源及開發工具、功耗及價格等因素。
選用了TI公司的TMS320F2812芯片作為主處理器,主要基于以下幾點考慮:
(1)它的主頻高,時鐘頻率可達150 MHz,可以滿足系統的需要;
(2)本身具有的大容量片內FLASH可方便系統實現、降低成本;
(3)有著較多通用I/O口可以靈活配置,可以很方便地實現與其他器件接口;
(4)TMS320F2812芯片系統采用高性能靜態CMOS技術,功耗非常低。
1.3 存儲、顯示和控制單元
為了能實時提供給用戶定位信息,本文設計中采用LCD液晶顯示屏和SD卡存儲器作為人機對話窗口。能實時、快速地輸出定位信息,通過軟件編程設計了簡單方便的、友好的人機操作界面。測量時可按照簡單的操作提示進行。另外,還可以將必要的數據存入SD卡存儲內部設備,方便后續查詢。
2 系統軟件設計
本文所設計的軟件程序采用C語言和匯編語言進行混合編程,對每一個功能模塊的子程序進行編譯和調試。程序設計主要部分包括:主程序部分;接收子程序;數據處理子程序;存儲部分子程序。所設計的具體軟件流程如圖3所示。
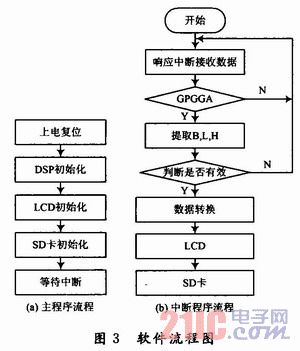
(1)主程序部分:主要完成DSP的CPU初始化、建立中斷向量表、SD卡初始化、給OEM板初始化等,還有對各個子程序進行調用。
(2)接收子程序:使程序指向接收數據緩沖區首地址,讓DSP處于讀接收狀態。當新月-HC12A OEM板接收到一幀信號時,就引串口接收中斷,將中斷信號送給DSP的中斷控制器,在其判斷中斷源后,DSP就會找到與之相應的中斷服務程序的入口地址。采用中斷方式接收OEM板發送過來的數據,一直等待接收到的字符是一幀數據的有效開始字符,判斷特征字“$GPG-GA”后再接收信息內容,若符合就接收;否則就放棄,再重新判斷。當接收到在收到“
(3)數據處理子程序:先緩沖接收到的數據,將接收到的有效幀數據進行提取和轉換處理,以“,”為標記進行分離數據分別,提取并判讀第1,2,4,9個逗號,就能提取到對應的時間、經度、緯度、高度等信息。所得到的經緯度的信息是ddmm.mmmmm格式,其是字符型需要轉換成十進制的。另外,由于時間標準的不同,要得到北京時間還需對提取的時間信息進行轉換處理。若需要坐標轉換則應調用坐標轉換子程序。處理完后將有用的信息送至LCD顯示。
(4)存儲部分子程序:對于收到的數據,提取處理后,將數據存放到緩存中,當緩存中存滿512 b后,就將其寫入到SD卡里,以備事后處理。
3 測試結果分析
3.1 靜態測試方案與分析
將GPS天線用三角架放置在樓頂上,進行了4次天線在不同位置的實驗,所有靜態點的數據采集時間均持續5 min(300個數據點),記錄每個時間段對應的位置數據的文件。提取其中標準點的經緯度信息,可得到其位置分布如圖4所示。
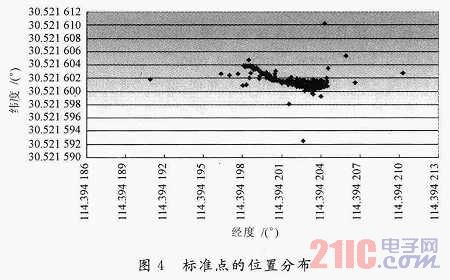
從圖4可以清楚地看出,雖然存在一些離群點,但是數據的密集程度還是比較高。經計算,經度方向主要集中在114.394 196°~114.394 205°,相差大約在O.000 009°(O.863 2 m);緯度方向主要集中在30.521 599°~30.521 604°,相差只是大約在O.000 005°(0.554 7 m)。從以上數據分析結果來看,在天氣情況較好的情況下,單點定位的平面誤差小于1 m。
CEP分析:為了對廠家所標定的(單機定位:小于2.5 m(2DRMS))指標進行檢驗,在天氣晴朗的條件下,對采集的4個點的實測數據,利用計算圓概率誤差的方式進行了分析;其中,每個點的測試時間為5 min,各得到300個數據點。計算得到圓概率誤差半徑,采用Matlab軟件編程作圖得到圓概率半徑圖,如圖5所示,只列出一個圖。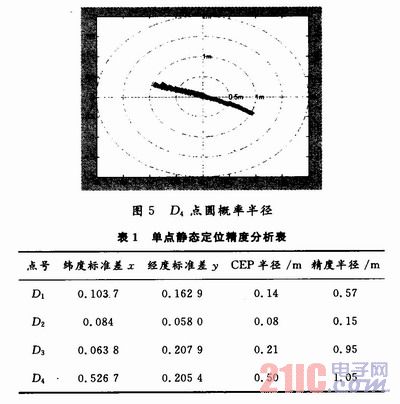
由圖5可見,所測的點都包含在半徑為1.05 m的圓內,具體計算的各個點的定位實驗數據見表1所示。
從表1可知,所測數據中精度半徑最大的為1.05 m。而各個點的圓概率誤差半徑(CEP)最大值為o.5 m,這些數據小于接收機的標定位置精度1.042 m(CEP)(由2.5 m(2DRMS)換算來)。
3.2 動態測試方案與分析
為了在運動中檢驗測量精度設計了本項實驗。實驗地點在西操場上,沿預操場的第一跑道和第三跑道繞行一周后回到原點,分別進行4次實驗。繞行過程中保持勻速。對所采集的數據進行提取、轉換處理后,用Matlab軟件對數據進行仿真,將實測經緯度換算成距離單位后,畫出4次實驗的軌跡圖見圖6。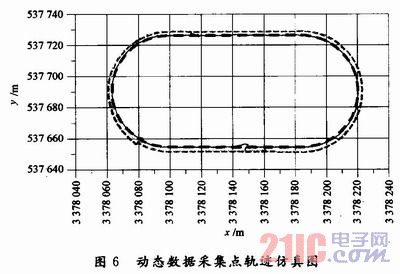
圖6中,里面兩圈是在第一跑道線上,外面兩圈是在第三跑道線上的軌跡圖,每條跑道寬1.2 m,這兩條線間的距離為2.4 m。雖然在行走過程中所得到的軌跡點與直線軌跡存在誤差,但是大致上還是比較理想的。實驗軌跡相距最大偏離距均在1 m以內,與靜態定位精度基本一致。
分析其中最大偏差部分析其存在誤差的主要原因是:在行走過程中,由于不能始終保持天線在一個水平面上,以及未能保證行走的路線完全重合所造成的。總體來講,該定位軌跡圖能較好地反應實際的形狀。說明該GPS模塊動態定位性能還是比較好的,可以用于較準確的實時導航。
綜合靜態和動態測試結果表明,使用的新月-HC12AGPS模的圓概率誤差半徑(CEP)最大值為0.763 9m,小于其標定位置精度1.042m(CEP),說明廠家提供的精度參考值可靠。
所得到的單點的精度半徑(100%點)約2m,小于生產廠家給的(2.5m),說明該模塊可以滿足多數情況下物探測網的平面測量精度要求,表明系統設計方案可行。
4 結語
本文通過對整個接收機系統的研究和設計,主要得到以下結論:
(1)所選用的GPS-OEM定位精度能滿足設計需求。在配合使用右旋極化陶瓷介質天線進行的單機靜態測試結果表明,單點定位精度小于1m,由4次動態測試可得該接收機的導航的最大偏差也在1 m左右,能滿足大多數地球物理勘探的平面測量精度要求。
(2)設計GPS接收機系統的整體思路是正確的。選用中低檔的GPS-OEM來設計實現單點定位精度較高、價格適中的GPS接收的思路是正確的,實現了用中低檔GPS-OEM和較好的接收天線來研制高精度GPS接收機的設想,也為后續的設計者提供了借鑒。
(3)提出的整體的設計方案是可行的。選用DSP芯片和GPS-OEM板開發GPS接收機是可行的,能達到實時定位的功能要求;選用的TMS320-F2812DSP芯片能滿足實時性的要求。其中所設計的DSP模塊電路可以能滿足系統要求。