
1 引言
交流變頻調速的方法是異步電機最有發展前途的調速方法。隨著電力電子技術、計算機技術和自動控制技術的不斷發展,交流電機變頻調速已經逐步取代直流電機調速,并經歷了采用電壓頻率協調控制、轉差頻率控制、矢量控制以及直接轉矩控制的發展過程。其中,轉差頻率控制技術的采用,使變頻調速系統在一定程度上改善了系統的靜態和動態性能,同時它又比矢量控制方法簡便,具有結構簡單、容易實現、控制精度高等特點,廣泛應用于異步電機的矢量控制調速系統中。鑒于以上優點,本文對轉差頻率控制的異步電機矢量控制調速系統進行了研究分析和仿真。使用MATLAB中的仿真工具箱SIMULINK為基于轉差矢量控制的異步電動機變頻調速系統建立了仿真模型,并給出了仿真結果。
2 轉差頻率矢量控制的基本概念
矢量控制的思想是以轉子磁場為定向,通過轉子磁場定向的旋轉坐標變換實現勵磁和轉矩的解耦,從而可以達到和直流電機一樣的控制效果。轉子磁場定向有兩種方法:①通過設置觀測器估計轉子磁場空間角;②通過對轉差角頻率和轉子角頻率積分得到轉子磁鏈的空間位置。第二種方法即轉差矢量控制的依據。轉差矢量控制不必檢測磁通,簡單易行,受到人們的普遍重視并得到廣泛應用。
轉差頻率矢量控制不需要進行復雜的磁通檢測和繁瑣的坐標變換,只要在轉子磁鏈大小不變的前提下,通過檢測定子電流和轉子角速度,經過數學模型的運算就可以間接的磁場定向控制。要提高調速系統的動態性能,主要依靠控制轉速的變化率,顯然,通過控制轉差角頻率就能達到控制的目的。轉差頻率矢量控制就是通過控制轉差角頻率來控制轉速的變化率,從而間接控制電機的轉速。
3 轉差頻率矢量控制的變頻調速系統
轉差頻率控制的異步電動機矢量控制系統的結構如圖1所示。該系統為磁鏈開環、轉差型矢量變換控制的交-直-交電流源變頻調速系統。
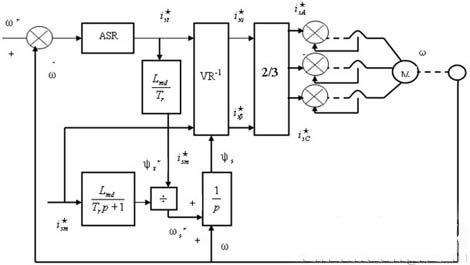
在轉差頻率控制交-直-交電流源變頻調速系統的基礎上,把從穩態特性出發的和函數關系換成從動態數學模型出發的矢量變換控制器,就得到轉差型矢量變換控制系統。這樣,轉差頻率控制系統的大部分不足之處都被克服了,從而大大提高了調速系統的動態性能。
這個系統的主要特點如下:
1)轉速調節器的輸出信號是定子電流轉矩分量的給定信號,與雙閉環直流電動機調速系統的電樞電流給定信號相當。
2)定子電流勵磁分量給定信號和轉子磁鏈給定信號之間的關系是靠矢量變換控制方程式的磁通控制方程式建立的,其中的比例微分環節 使 在動態中獲得強迫勵磁效應,從而克服實際磁通的滯后。
3)定子電流勵磁分量給定信號和轉子磁鏈給定信號經直角坐標/極坐標變換器后產生定子電流幅值給定信號。
4)定子頻率信號,這樣就把轉差頻率控制的主要優點保留下來了。由積分產生決定M軸(轉子磁鏈方向)相位角φ的信號 。
4 轉差頻率矢量控制調速系統仿真和分析
4.1 仿真模型的建立

圖2是轉差頻率矢量控制變頻調速系統的MATLAB仿真模型.異步電動機由一個電流控制型PWM變流器供電,驅動一個機械負載(用慣量J、摩擦系數B和負載轉矩TL表示).它由異步電動機模塊、異步電動機測量模塊、變頻器模塊、速度調節器、電流調節器、函數發生器、三相可控振蕩器以及測量模塊等構成。
4.2仿真結果
電動機的參數:設置異步電動機的參數:2.238 ,220 ,2極,定子電阻 =0.435 ,定子漏電感 ,互感 ,轉子電阻 ,轉子漏感 ,轉動慣量 ,摩擦系數 。
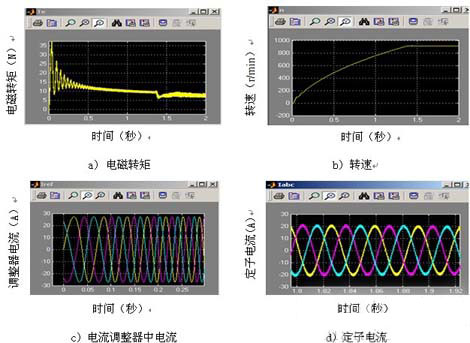
開始仿真,在示波器模塊上分別觀察轉矩、轉速、電流調整器中電流和定子電流,仿真波形如圖3所示。可以觀察到,大約經過1.5s,系統達到穩定狀態.更改圖2中給重新啟動仿真,能觀察到不同的驅動響應.
從以上仿真結果,可以看出在啟動和加載過程中,電動機的轉速、電流調整器中的電流、定子電流和轉矩的變化過程。從(b)可以看出隨著頻率的增加轉速逐步提高,在t=1.5s的加載過程,轉速有一定的波動,稍后調整后穩定在給定轉速。從(a)中可以看出電動機在零狀態啟動時,電動機磁場有一個建立的過程,在建立過程中磁場變化是不規則的,這也引起轉矩的變化,但最終趨向穩定。又因為異步電機矢量控制沒有直流電機的換向過程,所以其控制性能完全可以與直流調速性能相媲美。另外,通過仿真結果可以看出轉差頻率控制的矢量控制系統具有良好的控制性能。
5結論
矢量變換控制系統結構簡單,思路清晰,所能獲得的動態性能基本上可以達到直流雙閉環控制系統的水平,得到了普遍的應用。
轉差型矢量變換控制系統M、T坐標的定向是由給定信號確定并靠矢量變換控制方程式保證的,并沒有在系統運行過程中實際檢測轉子磁鏈的相位,這種情況屬于間接磁場定向。在動態過程中,實際的定子電流幅值及相位與給定之間總會存在偏差,而且電動機參數的變化也使實際參數與矢量變換控制方程中所用的參數不一致,這些都會磁場定向上的誤差,從而影響系統的動態性能。這是間接磁場定向的缺點。為了解決這個問題,在參數辨識和自適應控制方面做了許多研究工作,獲得不少研究成果。
從另一方面,要使矢量變換控制系統具有和直流電動機調速系統一樣的動態性能,轉子磁通在動態過程中是否真正恒定是一個很重要的條件。圖1所示的系統中對磁通的控制實際上市開環的,在動態過程中肯定會存在偏差。要解決這個問題應該增加磁通反饋和磁通調節器,或采用實際轉子磁鏈的定向,即直接磁場定向。