
引言
電動執行器是工業過程控制系統中一個十分重要的現場驅動裝置,其能源取用方便、安裝調試簡單,在電力、冶金、石油、化工等工業部門得到越來越廣泛的應用。電動執行器包括電動執行機構和調節閥兩部分,控制精度主要決定于電動執行機構的控制性能,它能夠將系統的控制信號轉換成輸出軸的角位移、直線位移,控制閥門等截流件的位置或其它調節機構,使被控介質按系統要求狀態工作。
開關磁阻電機調速系統SRD(Switched Reluctance Drive)是繼變頻調速系統、無換向器電動機調速系統之后發展起來的最新一代交流無級調速系統。它具有機構簡單、堅固、成本低、工作可靠、控制靈活、運行效率高等諸多優點,由其構成的傳動系統具有交、直流傳動系統所有的優點。基于開關磁阻電機特點,可以將開關磁阻電機調速技術運用在智能電動執行器系統中,這對提高智能電動執行器控制性能至關重要。
一、SRD系統的基本結構
開關磁阻電機調速系統SRD主要有SRM、功率變換器、位置檢測、控制器構成。如圖1所示。
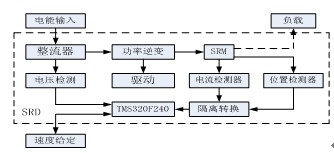
圖1.SRD系統結構圖
二、SRD系統的硬件設計
1.功率變換器的主電路設計
功率變換器的性能和形式直接影響SRM的效率、成本和可靠性,合理設計功率變換器是提高整個SRD性價比的關鍵。功率變換器主要有3個作用:一是開關作用,是繞組與電源接通或斷開;二是為繞組的儲能提供回饋途徑;三是為SRM提供電能,滿足機械能的轉換。常見的SRM功率變換器有3種:一是雙繞組功率變換器;二是不對稱半橋功率變換器;三是H橋式功率變換器。
本系統采用的是電容分壓型主電路,它也叫電容裂相型主電路或雙電源型主電路,是四相SRM廣泛采用的一種功率變換器電路,其電路結構如圖2所示。

圖2 電容分壓型主電路
在此電路中,SRM采用單相通電方式,當上橋臂的開關管 導通時,A相繞組從電容 吸收電能;當 斷開時,則 導通,A相繞組的剩余能量回饋給電容 。而當下橋臂 導通時,繞組B從 吸收電能:當 斷開時,B相繞組的剩余能量經VD2回饋給 。因此,為了保證上、下兩個電容的工作電壓對稱,該電路僅適用于偶數相SRM。由于采用電容分壓,加到電機繞組兩端的電源電壓僅為 ,電源電壓的利用率降低。在同等功率情況下,主開關器件的工作電流為雙開關型電路中功率器件的兩倍.而每個主開關器件和續流二極管的額定工作電壓為 ( 是換相引起的瞬時電壓)。
2. 位置檢測的硬件實現
本文電機采用半數檢測方案。對于8/6 SR電機而言,在一個轉子極距角 內,共有4個步進角,位置檢測信號應相應變化4次,當轉過一個轉子極距角后,位置信號又回到起始位置,如此循環,即可使轉子位置與繞組導電的順序配合起來。圖3為光電式位置檢測電路及整形電路。

圖3 ALVC164245的邏輯結構
四、SRD系統的軟件實現
4.1 控制算法
本文采用DSP數字PI調節器,實現對電機的雙閉環控制,圖4為其控制框圖。內環為電流環,外環為轉速環。計算出的轉子實際轉速與給定轉速進行比較,偏差通過速度控制生成電流參考值。它與電流反饋構成電流閉環,經PI調節來控制PWM的占空比,實現電機速度的控制。

圖4 雙閉環控制框圖
4.2 軟件結構
本系統中的軟件設計采用標準C語言與DSP(TMS320LF2407)匯編語言編程,實行模塊化設計,增加了程序的可讀性和移植性。本系統程序包括系統的各模塊初始化、電流環和位置環中斷程序,主要分為主程序和中斷程序。
4.2.1 主程序
主程序主要完成系統的初始化、初始化狀態的顯示及起動、運行子程序的調用。圖4為主程序的流程圖。
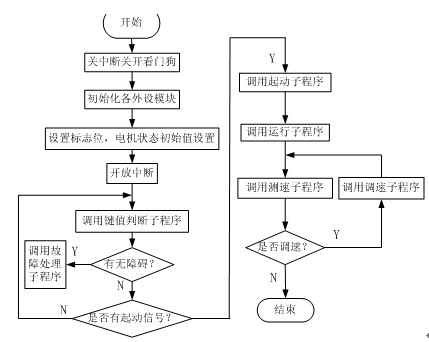
圖4. 主程序流程圖
4.2.2 中斷服務子程序
中斷服務程序主要包括故障處理子程序、捕獲子程序和速度檢測。
在系統運行過程中,由于各芯片本身電流、電壓的承受能力以及環境的影響,故障的發生是在所難免的。系統出現故障事先讀取故障標志,再判斷故障類型。若故障為欠壓、過壓類型,則調用過壓、欠壓故障處理子程序;若故障為過流、過熱時,調用過流、過熱故障處理子程序。待故障處理后,中斷返回。
捕獲子程序主要完成對捕獲單元檢測的位置信號進行判斷及處理并計算電機的轉速。位置傳感器輸出的兩路位置信號s1、s2在一個周期內有四種不同的組合,按照不同的組合將一個周期里的兩路位置信號劃分為四個狀態,采用兩位二進制編碼區分不同的狀態,即狀態0(00)、狀態1(01)、狀態2(10)、狀態 3(11)。在該程序中處理器讀取兩個轉子位置檢測器的輸出電平,根據這兩個信號的組合就可以決定哪一相應該通電。當捕獲輸入端發生跳變時,捕獲單元會將跳變時刻的定時器的計數值存入到一個兩級的FIFO棧,這就方便了計算轉子的轉速。
雙閉環調節程序中采用PI算法,該算法流程圖如圖6。PI控制的原理是根據給定值 與實際輸出值 的偏差 來進行控制的,將偏差的比例和積分通過線性組合構成PI調節器,對受控對象進行控制。其控制規律為: ,式中, 為比例系數, 為積分時間常數。
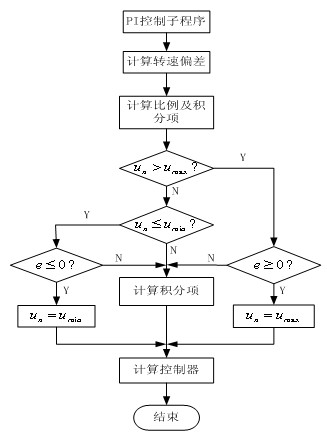
圖6 PI控制軟件流程圖
五、實驗結果
采用本文所設計的調速方案,得到的不同轉速下電機的電流曲線如下圖:
該調速系統采用兩相勵磁運行。電流曲線圖中為A、C相電流曲線(2A/div),其導通順序為DA-AB-BC-CD,對應轉子位置信號為00-01-11-10。由于考慮到電感的影響,在算法中應用PI算法,電流波形的波動很小,起到滿意得控制效果。
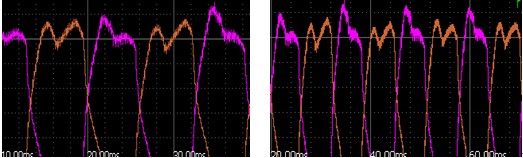
V=800r/m V=1500r/m
六、結束語
本文對基于SRM的智能電動執行器調速系統的控制器部分進行了探討和研究,完成了對SRM調速系統控制器部分程序的設計工作,實現了位置檢測、速度計算、電流斬波以及PWM電壓輸出等功能。采用本文所述的PI調節控制算法對智能電動執行器進行調速控制,通過大量實驗得出的實驗曲線表明,該調速系統應用于智能電動執行器上,在轉速和電流方面都能很好的跟隨給定,有效的減小電流波動,取得良好的控制效果。