
1熱釋電傳感器及其探測原理
1.1PIR(Pyroelectric infrared Sensor)簡介
熱釋電傳感器是一種新型被動紅外探測元件,由鐵電介質材料制成,輻射加熱作用使材料自發極化強度變化。溫度升高,極化強度降低,相當于釋放出一部分電荷。制備熱釋電傳感器的鐵電材料有:硫酸三甘肽(TGS)、鈮酸鍶鋇(SBN)和鈦酸鉛(PbTiO3)等。熱釋電傳感器內有兩個關鍵性的元件:(1)熱釋電紅外感應單元(PIR Unit),能將波長為8~12μm之間的紅外信號變化轉變為電信號,并能對自然界中的白光信號具有抑制作用。(2)菲涅爾透鏡組(Fresnel Lens Array),是由若干個Fresnel Lens組成。菲涅爾透鏡包括兩種形式,即折射式和反射式,有兩個作用:①聚焦作用,將熱釋的紅外信號折射(或反射)在PIR上;②通過區域性遮斷技術將警戒區內分為若干個明區和暗區,使進入警戒區的移動物體能以溫度變化的形式在PIR上產生變化熱釋電紅外信號,這樣PIR就能產生變化的電信號。
1.2探測原理[1]
熱釋電傳感器是利用目標物體所發出的紅外輻射信號實現被動探測的,目標物體輻射能量的大小與物體絕對溫度有關,其關系遵循普朗克定律,關系式為:
Wλ=2πhc2[λ5(ehc/kT-1)]-1(1)
式中 h為plank常數(6.626×10-34Js);c為光速(2.9979×108m/s);T為絕對黑體的溫度(K);λ為波長;K為Bolzman常數(1.38110-21J/K)。Wλ為絕對黑體的光譜輻射發射量,由(1)式,可知:
(1)目標物體的輻射能量隨溫度的升高而增大;
(2)隨著溫度的升高,物體輻射能量的峰值向短波方向移動,其變化符合維恩定律,即:λpT=2897.8,λp為峰值時紅外線波長;
(3)相同溫度下,不同目標物體的輻射能量是不同的。
1.3信號調理電路
由于熱釋電傳感器輸出信號頻率和幅度比較低,易受外界環境的影響產生干擾,除了設置抗干擾電路外,選用放大器時應選低噪聲、低漂移、低功耗、具有溫度補償的高增益精密運算放大器,實際電路見圖1。
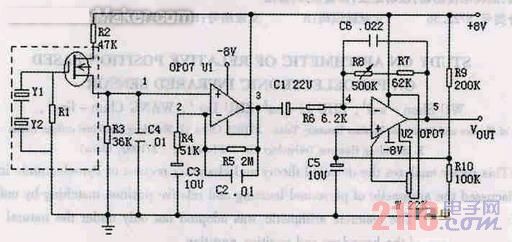
圖1熱釋電傳感器與信號調理電路實際連接圖
熱釋電傳感器的輸出信號直流電平為1V,幅度為1mV的交變信號,該信號通過熱釋電傳感器內部場效應管的源極輸出,即圖1中的節點1。第一級運算放大器(U1)是低頻小信號放大電路,輸出節點為3。第二級運算放大器(U2)為具有微分補償電路的直流放大電路,由元件C1、R6、R7、R8和U2組成,輸出電壓V3波形如圖2。
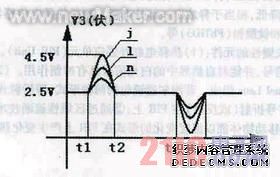
圖2信號調理電路輸出電壓波形
圖中t1~t2之間的曲線表示當人員進入傳感器時波形變化情況,t2~t3之間的曲線表示當人員在傳感器內部時波形變化情況,t3~t4之間的曲線表示當人退出傳感器時的波形變化情況。從波形的變化可以看出:當人員進入傳感器時,在直流電平2.5V的基礎上迭加了一個正的電壓波形,而退出時,迭加了負的電壓波形,由此得出結論:人員進入時信號幅度正向增大,而退出時信號幅度間反向增大,該結論作為人員定位與移動相對位置匹配算法的判定依據。
2位置相關算法
2.1算法的設計思想
定位軟件是指通過特定的算法確定人員具體位置的軟件,從而確定是否進行預報警或者報警,若預報警,則單片機發送預報警指令,進行聲光報警;如報警,除了啟動聲光報警裝置外,同時應將大型機械停車,以確保人員安全。為此,算法設計的關鍵是將探測區域進行合理的劃分。
2.2算法的具體實現
圖3是由三個熱釋電傳感器輻射區域交叉組成的平面結構圖。三個傳感器輻射區域兩兩相交,共分為8個區域,將這些區域劃分為安全區、預報警區和報警區。其中1、2、3、4、6、7為預報警區,5為危險區,若有人進入該區則報警并輸出閉鎖控制信號,使轉載機停車。
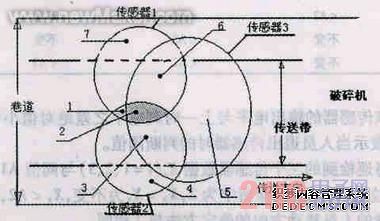
圖3三個傳感器輻射交叉平面結構圖
2.2.1具體數據格式
前一時刻的位置表示人員上一時刻在探測范圍內的具體位置,作為移動方向判定的基本依據;傳感器1、傳感器2和傳感器3表示三個傳感器檢測信號經A/D轉換后的數值;PLAST為上一時刻人員的位置(0~7),稱之為保留字,初值為0,表示人員在報警區以外的安全位置。②X=[ X1,X2,X3]。XK表示人進入(或者退出)由K號傳感器所確定的平面區域時,傳感器的檢測信號經過模數轉換后的值,它的范圍為00~FFH,對應模擬量0~5V。設無人進出時,信號調理電路的輸出直流電平為2.5V,但是由于環境噪聲的存在(如:氣流的變化、濕度的變化、大型機械的的開停等),信號調理電路的輸出信號迭加了一定的噪聲電平△A,總輸出為2.5+△A,△A可正可負,它的值可通過單片機學習功能得到。
2.2.2函數關系
通過分析我們發現:圖3中每個具體位置是由不同傳感器所包圍形成的,人員從不同位置移向另一位置時,相應傳感器測得的數據會發生較大變化,而其它傳感器的數據變化小于某個值△k。即:人員的位置(Position)由上一時刻人員的位置PLAST和該時刻三個傳感器的電平經A/D轉換后的數值X(X1、X2和X3)確定,并且給定PLAST和X(X1,X2,X3),可唯一確定Position,他們之間滿足下列函數關系式:
Position=f(PLAST,X)
2.2.3數據存儲
由函數關系的討論可知,人員的當前位置與前時刻的位置及當前傳感器測得的數據有關。為了描述方便,我們稱人員前時刻的位置為“保留字”,當前傳感器檢測值與閾值的比較稱為“判斷條件”,人員前時刻的位置和當前判斷條件存儲在外部的非遺失性存儲器中,數據存儲形式為鄰接表,表頭為0~7保留字,共計8個位置,表的其它內容為從該位置移動到相應位置的變化條件,即傳感器檢測信號的變化情況。以保留字2為例,與其相鄰的位置為1、3、4、5、6和7,具體確定方法見圖3。當傳感器的輸出變化情況發生改變時,人員的移動方向和位置是不同的,與保留字2相鄰的位置和條件對應關系見表2。與其它保留字相鄰的位置和條件的對應關系確定方法與表2相同。
表2與保留字2相鄰的位置和條件對應關系

表2中,“不變”是指該傳感器的輸出電平與上一時刻電平之差絕對值小于△K;A1表示當人員進入傳感器時的判斷閾值;A2表示當人員退出傳感器時的判斷閾值。
2.2.4具體定位方法
將巡檢到的三個傳感器數據Xi(i=1、2、3)與閾值A1和A2比較,據保留字和比較結果可判斷人員的當前位置。比如:設保留字為2,X2=X3為不變,X3
4結束語
利用三個熱釋電傳感器實現了人員定位算法,即位置相關算法,適當增加檢測的傳感器數量,可提高檢測精度和準確度,但算法會變得很復雜,該算法不僅適合于煤礦環境的人員定位,而且也適用于其它需要界位劃分的場合。算法的實現是推動被動定位技術發展的一個重要補充和探索。獨特的傳感器系統結構設計,可任意調整探測距離和范圍,具有較大的靈活性。利用該算法實現的人員安全保護系統已在煤礦生產中得到了廣泛應用。