
溫度控制是工業控制的主要對象之一,常用的溫控數學模型是一階慣性加上純滯后環節,但其隨著加熱對象和環境條件的不同,會存在著較大的差異。因為溫控對象這種較為普遍的含有純滯后環節的特點,容易引起系統超調和持續的振蕩,溫度控制對象的參數會發生幅度較大的變化。因此無法采用傳統的控制方法(如常規的PID控制)對溫度進行有效的控制,而智能控制不需要對象的精確數學模型就可以對系統實施控制[1]。溫度控制多采用由單片機系統來實現溫度控制,其缺點是遠程控制系統復雜,可靠性差,特別是當控制點較多、距離較遠時,采取總線方式的通訊出錯概率較高,影響到溫度的控制精度[2]。
目前,多家廠商(如日本導電、島通)均推出精度可達0.1級的基于PID算法的智能型溫控儀表,然而這些公司對其核心技術并不公開,同時也不開放用于系統改進的接口或者代碼。本文的設計基于STM32硬件單元,采用一種溫控單元與計算機相結合的主從式遠程溫度控制模式。利用工控機進行PID參數整定后通過網絡控制溫控單元的輸出,溫控單元輸出控制信號調整可控硅的開角,從而達到改變加熱功率的目的。本文采用儀表與計算機相結合的主從控制模式,軟、硬件部分分別獨立工作,便于系統的升級改造,可以有效地提高控制策略的靈活性。
本文所研究的基于組態軟件實現的模糊PID算法智能溫度遠程監控系統,能較好地解決溫度的遠程控制問題,且系統結構非常簡單,溫度控制精度高。
系統總體方案設計
溫度控制系統用于控制電加熱爐內的溫度,熱源為高溫電阻絲,采用可控硅電壓調整器來進行電加熱爐的溫度調整,此調整器是通過控制可控硅的導通角而調整輸出電壓、改變加熱體的發熱功率、從而達到控制電加熱爐溫度的目的。
溫控系統設計" src="http://files.chinaaet.com/images/20110602/a76ef02e-1659-41f3-84a2-250005cb8497.jpg" />
如圖1所示,加熱爐實時的溫度由溫控單元采集熱電偶轉變為電壓信號,經溫控單元整理后,通過TCP/IP協議將打包后的溫度數據傳送至工控機端,將此溫度的采樣值與設定值比較,采取相應的控制算法計算出實時的PID參數,通過網絡控制溫控單元,溫控單元輸出4~20mA電流信號至可控硅調壓器,對可控硅的導通角的開度進行控制,調整加熱爐的溫度。采用本方案設計的系統具有結構簡單,易于實現的特點。

溫控單元設計方案
溫控單元實現的功能包括溫度信號的模擬量數據采集、控制調壓器可控硅開角的模擬信號輸出、控制信號的I/O輸出,以及溫控單元與工控機之間的數據傳輸等。
STM32系列32位閃存微控制器使用ARM公司的Cortex-M3內核,處理器的核心是基于哈佛架構的3級流水線內核,該內核集成了分支預測,單周期乘法,硬件除法等眾多功能強大的特性[3],目前已經獲得了廣泛的應用。
溫控單元選用的處理器是STM32的增強型系列處理器—STM32F103。該處理器頻率為72MHz,帶有片內RAM和USB 2.0接口、16通道的12位A/D轉換器、2通道的12位D/A轉換器、以及I/O通道等豐富的外設。其中系統集成的雙ADC結構允許雙通道采樣/保持,以實現12位精度、1μs的轉化。處理器的雙ADC結構為2個工作在非連續模式的獨立的時序控制,具有多個觸發源,每個通道的采樣時間均可編程。
本文設計的系統采用獨立于微控制器(MCU)的專用網絡接口芯片來實現TCP/IP協議,網絡芯片選擇W5100,微處理器與網絡芯片通過SPI接口進行連接。溫控單元硬件組成如圖2所示。
控制策略的選擇
電加熱爐是一個復雜的受控對象,具有多參數、非線性、時變性、純滯后、多干擾等特點,對其進行精確的數學建模非常困難。模糊控制系統是一種自動控制系統,它是以模糊數學、模糊語言形式以及模糊邏輯理論為基礎,采用計算機控制技術構成的一種具有閉環結構的數字控制系統。模糊控制不需要被控對象的精確數學模型,并且可以引入專家經驗,可以較好地解決此類溫度控制問題。但由于單獨使用模糊控制不易消除穩態誤差,且對控制器運算性能要求較高,而PID算法簡單又可以較好地消除穩態誤差,實際運行效果和理論分析表明,這種控制規律在相當多的工業生產過程中能得到比較滿意的結果[4]。
PID控制器是通過對誤差信號()et進行比例、積分和微分運算,其結果的加權,得到控制器的輸出()ut,該值就是控制對象的控制值。PID控制器的數學描述為:
![]()
式中()ut為控制輸入,()()()etrtct=−為誤差信號,()rt為輸入量,()ct為輸出量。
PID控制的傳輸函數為:
將模糊控制與PID控制結合,根據操作經驗與模糊理論,在線自整定PID控制器的3個基本控制參數,輸出控制變量,利用模糊控制實時修正PID參數,提高系統的控制精度和魯棒性,該控制器具備自適應性,系統采用的控制器結構如圖3所示 [5]。
遠程溫控系統的應用
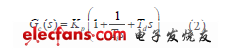
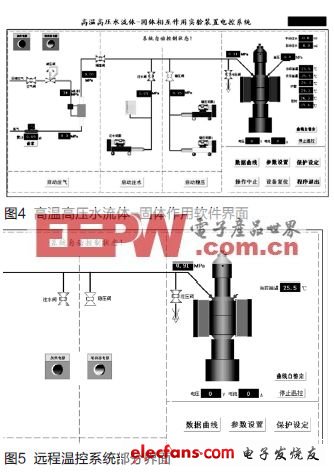
高溫高壓下水流體-固體相互作用在自然界、工業生產、工程技術以及科學實驗中都廣泛存在,無論在地球科學、物理學、化學等自然基礎科學還是在應用科學、工程技術和工業生產中,水流體-固體相互作用都是極受關注的基本科學問題。各類高溫高壓下水流體-固體相互作用的科學問題可通過相應的實驗裝置分析,目前所用的實驗裝置的精度及自動化水平較低。采用先進的控制技術及計算機技術,控制反應器整體溫度的一致性與穩定性,實現高溫高壓下水流體-固體相互作用溫控裝置的自動化,可提高實驗效率及數據的精確度。
在高溫高壓下,水流體-固體相互作用實驗存在如爆炸、濺出等事故傷人的可能。基于安全性的考慮,溫度控制部分采取了本文設計的遠程溫控方式,實驗者以遠程監控的方式控制反應設備,有效地保護了實驗操作人員的安全。
采樣信號預處理
為防止外界干擾、野值等對系統控制的穩定性造成影響,將采集到的溫度傳感器信號首先通過卡爾曼濾波器進行數據的預處理。
控制界面的設計
組態軟件集成了電路圖形技術、人機界面技術、數據庫技術、控制技術、網絡與通信技術,使控制系統開發人員不必依靠某種具體的計算機語言,只需通過可視化的組態方式,就可完成監控軟件設計,降低了監控畫面開發難度[6],利用組態軟件可以完成監控和遠程控制,其基本設計思想是:首先完成工控機與溫控單元的通訊,用組態軟件實現工控機的操作界面,通過設計建立良好的人機界面實現實時溫度的監控和動態顯示。
系統安全性設計
系統安裝有電壓變送器、電流變送器,可以實時監測電壓、電流數值,若出現加熱爐溫度及電壓過高、電流過大、可控硅擊穿保護、系統壓力異常、升溫速率失控、加熱爐斷線、短路時,加熱立即停止并報警。另外,考慮到可控硅調壓器及伺服啟動器電源的電壓為220V,為了防止出現觸電等安全事故,電源上均裝有交流接觸器,通過軟件遠程控制加熱的啟動和停止。
結論
本文設計了一種遠程溫控系統,應用于高溫高壓水流體-固體相互作用裝置,取得了良好的運行效果。但由于工業環境(環境溫度、電氣干擾等)的不確定性,系統的抗干擾設計處理流程以及異常處理機制還可進一步的優化與改進。