
0 引言
積分作用從某種意義上來說是人的記憶功能的模擬。對(duì)人而言,記憶功能具有某種選擇性;在控制中,人總是有選擇地記憶有用的信息而不記憶無用的信息。根據(jù)這一發(fā)現(xiàn),周其鑒于1983年提出了著名的仿人智能積分控制算法:

其中:u-控制輸出;Kp-比例系數(shù);k-抑制系數(shù);e-誤差;e-誤差變化率;em,i-誤差第i次峰值。
但是,信息的有用性是相對(duì)的,當(dāng)時(shí)過境遷時(shí),原來一些有用的信息會(huì)變成無用。這時(shí)除了不記憶當(dāng)前無用的信息外還會(huì)遺忘那些原來有用而當(dāng)前變得無用的信息。因此,仿人智能積分控制中的積分作用除表現(xiàn)人的記憶與不記憶兩種行為外,還應(yīng)該加上遺忘行為。
1 仿人智能積分控制
常規(guī)PID控制中的積分作用,不加選擇地“記憶”了誤差及誤差變化的所有信息,其中也包含了對(duì)控制不利的信息。因此,這種積分作用缺乏智能性,其對(duì)誤差的積分過程如圖1所示,且這種積分作用的針對(duì)性不強(qiáng),甚至有時(shí)不符合控制系統(tǒng)的客觀需要,只要誤差存在就一直進(jìn)行積分,造成“積分飽和”。
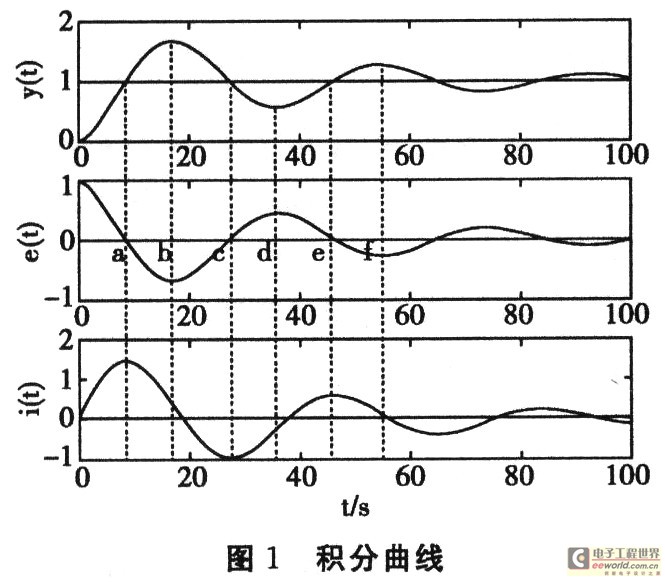
在積分曲線的(c,d)段,積分作用增加一個(gè)正量的控制有利減小回調(diào),但在(d,e)區(qū)間積分作用繼續(xù)增強(qiáng),其結(jié)果勢(shì)必造成系統(tǒng)再次出現(xiàn)超調(diào),這時(shí)的I控制作用對(duì)系統(tǒng)有害無利。為了克服這種積分控制作用的缺點(diǎn),滿足ee>0,加上積分作用。這樣,積分控制作用及時(shí)給出合適的附加控制量,能有效地抑制系統(tǒng)誤差的增加,而在ee>0時(shí),取消積分作用,使系統(tǒng)借助慣性向穩(wěn)態(tài)過渡。
2 反積分仿人智能控制
從動(dòng)力學(xué)角度來看,系統(tǒng)誤差的產(chǎn)生是由能量不平衡而導(dǎo)致系統(tǒng)應(yīng)有能量損失的一種表現(xiàn)。在系統(tǒng)控制時(shí),比例作用的主要目的是建立系統(tǒng)新的能量平衡,而積分作用的主要目的是彌補(bǔ)系統(tǒng)中應(yīng)有的能量積累。因此,良好的控制應(yīng)該預(yù)先補(bǔ)充較多的能量盡快地使系統(tǒng)恢復(fù),再在系統(tǒng)恢復(fù)的過程中逐步退回一些原來補(bǔ)人太多的能量,避免引起系統(tǒng)超調(diào)。為了使積分作用更加合理,在誤差增大區(qū)間施以較強(qiáng)的積分而在誤差減小時(shí)則應(yīng)施以適當(dāng)?shù)姆聪蚍e分使多余積分退出。這樣,系統(tǒng)在達(dá)到新的平衡時(shí)保持應(yīng)有的能量。
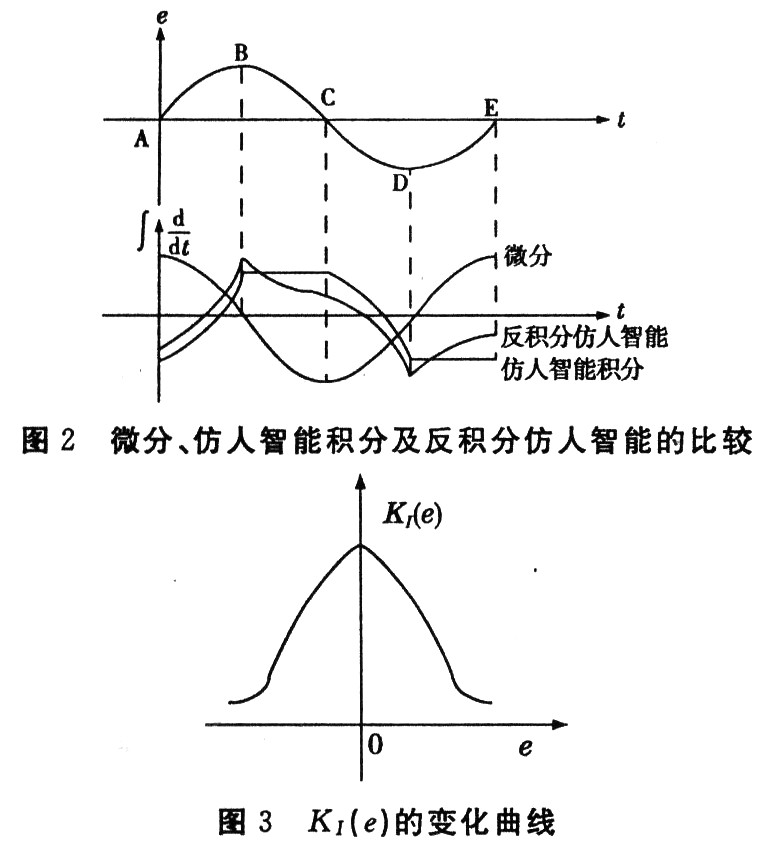
實(shí)際上,仿人智能積分控制從某種角度來說,不僅具有常規(guī)的積分功能,還具有類似于微分的功能,并且,這種用智能積分來體現(xiàn)微分功能的控制既敏感了誤差的變化趨勢(shì)又不像微分那樣對(duì)噪聲也非常敏感。因此,采用仿人智能積分控制時(shí)一般不需要再加微分作用。由圖2可見,在AB與CD兩個(gè)區(qū)間,反積分仿人智能控制和仿人智能積分控制的積分作用基本相同,主要體現(xiàn)常規(guī)積分作用,但在:BC與DE兩個(gè)區(qū)間,只有反積分仿人智能控制的積分與微分的趨勢(shì)保持一致,因此更好地體現(xiàn)了微分功能。表現(xiàn)在控制方面,則是控制器觀察到誤差將以某個(gè)速度通過誤差零點(diǎn)時(shí),將采取拉力的作用方式以防止大的超調(diào)量,在相平面內(nèi),D控制作用實(shí)際就是誤差的相軌跡。因此應(yīng)削弱控制初期D控制的作用;當(dāng)誤差接近0時(shí),則加強(qiáng)其作用,使D控制作用主要在誤差較小時(shí)起作用。
3 改進(jìn)仿人智能控制
綜合上述分析可知,合理的積分調(diào)節(jié)系數(shù)應(yīng)該是:
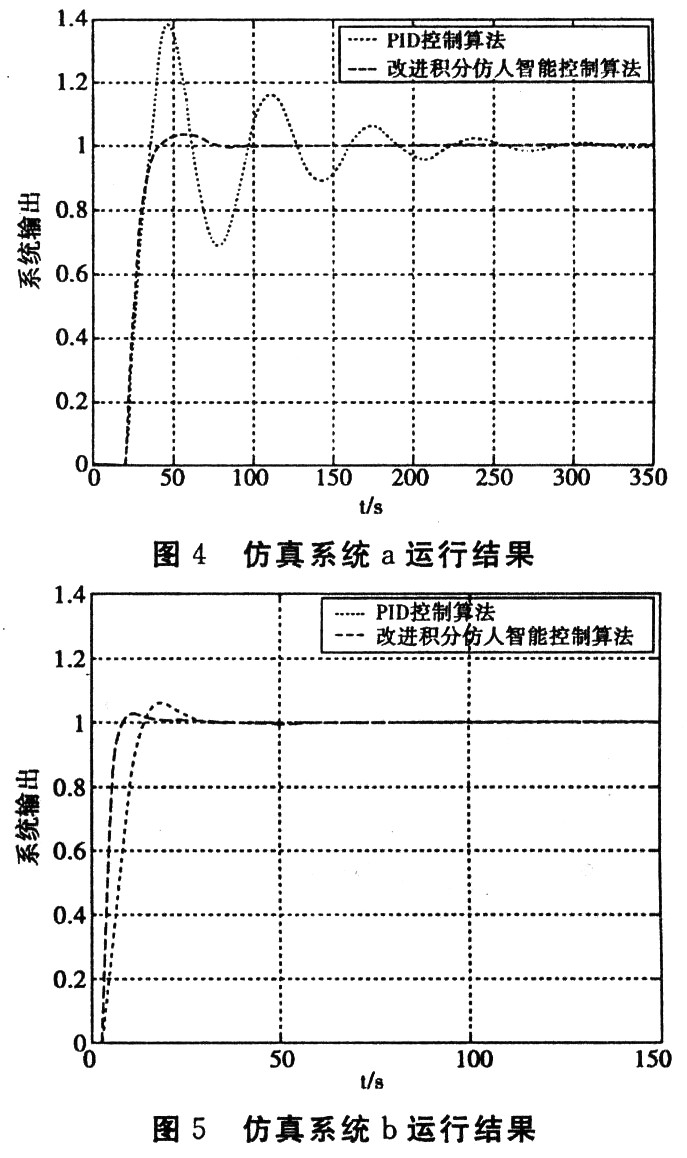
在ee>0區(qū)間上,在誤差較大時(shí),希望積分增益參數(shù)KI不要太大,否則∫edt產(chǎn)生較大的值,響應(yīng)產(chǎn)生振蕩;在誤差較小時(shí),希望積分增益增大,以消除系統(tǒng)的穩(wěn)態(tài)誤差。期望的積分增益的變化可選取如圖2所示的曲線。
據(jù)此構(gòu)造如下非線性函數(shù):

在ee<0區(qū)間上,使用仿人智能反向積分作用以使系統(tǒng)的超調(diào)減少,此區(qū)間反積分調(diào)節(jié)系數(shù)與微分調(diào)節(jié)規(guī)律相似;在誤差較大時(shí),反積分系數(shù)不要太大,避免減弱P控制作用;在誤差較小時(shí),則加強(qiáng)反積分作用。
據(jù)此構(gòu)造如圖的構(gòu)造函數(shù),得到如下改進(jìn)仿人智能算法:

式中,KI+(e)=KI+sech(αe);KI-(e)=KI-sech(βe);其余參數(shù)均同(1),(2)式說明。
4 仿真研究
為了檢驗(yàn)所設(shè)計(jì)系統(tǒng)的控制品質(zhì),在單位階躍輸入作用下,對(duì)工業(yè)工程中普遍存在的二階加純滯后對(duì)象進(jìn)行仿真,仿真分別在滯后較小和較大兩種情況下進(jìn)行,并與PID控制器進(jìn)行比較。下述各圖實(shí)線為仿人智能控制結(jié)果,虛線為PID控制結(jié)果。
(1)當(dāng)滯后較小時(shí):
被控對(duì)象傳遞函數(shù)為(采樣時(shí)間為1秒):

仿人智能控制器參數(shù):Kp=1.3、k=0.8、KI+=0.001、KI-=-0.002、α=1、β=0.7;PID控制器參數(shù)為:P=0.2、I=0.15、D=0.2。仿真結(jié)果如圖4所示。

仿人智能控制器參數(shù)為:Kp=1.3、k=0.8、KI+=0.6、KI-=-0.02、α=1、β=0.7;PID控制器參數(shù)為:P=0.3、I=0.04、D=0.08。仿真結(jié)果如圖5所示。
5 結(jié)束語(yǔ)
本文在仿人智能積分控制算法和反積分仿人智能控制算法的基礎(chǔ)上構(gòu)造了系統(tǒng)的非線性積分系數(shù)和實(shí)時(shí)整定積分系數(shù),通過仿真結(jié)果得知:改進(jìn)的仿人智能控制器對(duì)對(duì)象參數(shù)變化不是很敏感,并且對(duì)具有大延遲的對(duì)象,不論在穩(wěn)定性、快速性以及準(zhǔn)確性方面都比PID控制具有明顯的優(yōu)越性。而且隨著τ/T的增加,即系統(tǒng)的可控性越來越強(qiáng),改進(jìn)的仿人智能控制的優(yōu)越性就越明顯。