
目前普遍使用的物理靶面大多,如圖1所示,物理靶面由靶心和以靶心中心為圓心的一系列環線等組成。作為基準,靶面圖像中環線的識別和處理直接影響到報靶精度。在報靶精度要求不高的情況下,一般將圖像中靶環作為標準的圓來處理。在實際中,由于靶面與光學系統的不垂直及光學系統的畸變,圖像會產生相應的畸變,其結果是圖像中的環線并非正圓,所以由上述方法算得到的結果存在較大的誤差。因此環形靶面由于其固有缺陷,使報靶精度受到較大影響。
在條件允許的情況下,如果對物理靶面進行改造,或者根據實際應用設計物理靶面,往往能夠得到更高的報靶精度。文中提出了一種基于點控制的自動報靶系統,該系統采用標識點作為控制點,其相對靶面中心的位置已知,這些點具有已知半徑,降低了識別難度,一般的噪聲不會對其產生嚴重影響。采用簡單的閾值就可以實現點的分割,大大減小了圖像預處理工作,提高了系統的實時性。針對點控制,文中提出了采用距離加權平均法來計算靶數,避免了圖像的幾何矯正工作,同時保證了報靶精度,系統的通用性也大大增強。
1 靶面設計及系統工作原理
相對于傳統方法,基于點控制的自動報靶系統的物理靶面只是在普通靶上增加了一些點,這些點以環線上的點為圓心,那么,從靶心中心點到這些控制點中心的距離就是該控制點所在靶環的半徑。每個環線上平均分布著若干個點,圓環半徑越小,圓環上的控制點相對也越密集,計算精度也相對越高。圖2給出了用控制點對環線進行12等分的靶面示意圖。
系統主要分兩步來完成報靶工作。首先,在射擊前完成對靶面背景圖像的采集和處理。通過閾值將各控制點從背景圖像中分割出來,由于控制點半徑相對很小,圖像畸變對其影響很小,可以采用各控制點的重心作為其中心坐標,然后再從這些點中確認出靶心中心。其次,射擊完畢后,采集靶面圖像,將采集到的圖像和背景圖像進行差處理,獲取彈孔圖像,求取彈孔最內側點相對靶心的距離R’,根據圖像比例關系,計算物理靶面上彈孔距離靶心的實際距離R,靶面上的最大的環線半徑已知,根據下式計算靶數

2 關鍵算法
2.1 靶心的求取
在諸多控制點中確認出靶心是后續工作的基礎,為了工作的簡便,可以對靶心進行特殊處理(比如尺寸不同等)。為了使系統更具一般性和普遍性,通過算法來實現:對每一個點求取其到其它所有控制點的距離和,其中和最小的這個點即為靶心,下面給出理論依據。

將環線12等分,設為D1中心o到小圓a上各點距離平方和。如圖3(a)所示,a1、a2、……、a12分別為分布在小圓上的12個控制點,小圓半徑記為r,則
![]()
設D2為中心o到大圓b上各點距離平方和,如圖3(b)所示,b1、b2、……、b12分別為分布在小圓b上的12個控制點,大圓半徑記為R,則
![]()
在小圓a上任取一點,不妨取a1點,a1點到小圓其它各點以及到中心o的距離和設為D3,則
b1點到小圓上各點距離之和設為D’4則

由式(6)和式(9)可知,靶心到其它各點的距離之和相比其它各點到其它點的距離之和要小。
2.2 彈孔到靶心距離R的確定
由式(1)可以看出,R的計算精度唯一而直接地影響著報靶精度,針對點控制,提出了采用距離加權平均法來計算R。已知靶面上有n個控制點,適當選取其中距離彈孔眠最近的m個點作為控制點,分別記為M1、M2、…、Mm。物理靶面上這些點到靶心中心的距離分別為R1,R2,…,Rm;像面上M0到這些點的距離分別為r1、r2、…、rm,把1/ri(i=1,2,…,m)作為權重,采用加權平均的方法求取M0到中心基準點o的距離R,則

以m為例,如圖4所示,假設M1、M2、M3和M4分別為最靠近彈孔M0的4個點,o為中心基準點,o到M1、M2、M3和的距離為R1、R2、R3和R4,則

很好地反映實際情況。
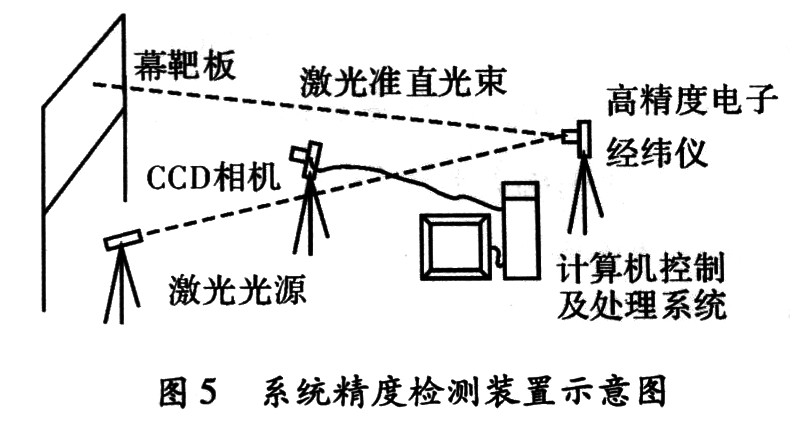
3 精度檢測
為了便于檢測,這里采用激光光斑模擬彈孔。檢測設備布置,如圖5所示,準直激光光束經過加裝在高精度電子經緯儀目鏡上的平面反射鏡反射后,在靶面上形成一光斑。調節電子經緯儀,使得激光光束垂直于靶面,光斑和靶心基本重合,經緯儀讀數為(α,β),把這個點記為T1;調節經緯儀,激光光束轉過一定的角度,經緯儀讀數為(α’,β’),此時的光斑記作T2,這時激光光束轉過的角度為(2(α’一α),2(β’一β))。假設經緯儀到靶面的距離為l,則光斑在物理靶面上的位移△x可以通過下式計算得到
![]()
假設T1和T2圖像上的中心為T’1和T’2,靶心為T,將T’1和T’2進行統一的坐標平移,平移后T’1和T重合。此時,T1可以看作靶心位置,T’2可以看作彈孔的位置,由本系統計算出T’2到T’1的距離△x’,即彈孔到靶心的距離R。令△=△x’-△x,則△的值就是測試的誤差。

以上系統精度檢測時,靶面距離電子經緯儀的距離l=3 880 mm,相機距幕靶板距離為1 550 mm。
從表1中的數據可以看出,從ccD相機到軟件處理系統,整個彈孔的檢測誤差小于一個像素。
4 結束語
文中對傳統的基于圖像處理技術的自動報靶系統進行了分析,針對其不足之處,提出了基于點控制的自動報靶系統,采用點控制代替線控制,降低了圖像識別的難度,大大減小了圖像預處理工作,達到了系統的實時性要求。針對點控制,提出了距離加權平均法來計算靶數,避免了繁雜的圖像幾何矯正工作。通過模擬實驗證明了該方法的可行性,并且具有較高的報靶精度。本系統亦可應用于多管平行度測量的工程中,并可得到很好的結果。