
摘要: 介紹了TMS320LF2407 DSP在無刷直流電機控制系統中的應用研究,采用了模糊控制策略,設計了上位監控系統,給出了數字化、智能化的實現方案,實踐結果證明了系統的平穩性和快速性滿足要求。
1 引言
永磁無刷直流電機具有交流電機的結構簡單、運行可靠、維護方便等特點,又具有直流電機調速性能好、運行效率高、無機械換向等優點,使它在機器人、數控機床、醫療器械、儀器儀表
儀器儀表
廣義的說儀器儀表也可具有自動控制、報警、信號傳遞和數據處理等功能,如氣動調節儀、電動調節儀表,以及集散型儀表控制系統等也皆屬器儀表。儀器儀表能改善、擴展或補充人的官能。如顯微鏡、望遠鏡、聲級計、酸度計、高溫計等,可以擴展人的視、聽、嘗、摸外部事物的官能;有些儀器儀表,如磁強計、射線計數計等,可感受和測量到人所不能感受到的物理量;還有些儀器儀表可以超過人的能力去記錄、計算和計數,如高速照相機、計算機等。 [全文]
等各領域得到了廣泛的應用。尤其是采用了DSP數字信號處理器、電子換向器、光電編碼器等,使得無刷直流電機的數字化、智能化控制系統的實現成為可能,也是當今研究與應用的熱點。但由于無刷直流電機本身存在非線性、數學模型難以建立等問題,單純用傳統的PID難以獲得較好的速度控制效果;加上以往用單片機
單片機
單片機是單片微型計算機(Single-Chip Microcomputer)的簡稱,是一種將中央處理器CPU隨機存儲器RAM、只讀存儲器ROM、多種I/O口和中斷系統、定時器/計時器等功能(可能還包括顯示驅動電路、脈寬調制電路、模擬多路轉換器、A/D轉換器等電路)采用超大規模集成電路技術集成到一塊硅片上構成的微型計算機系統。 [全文]
實現,線路復雜、速度慢,難以實現數字化、智能化控制。
本設計是在我所研制的DSP數字控制實踐開發系統的基礎上,以TMS320LF2407 DSP控制器為核心;以無刷直流電機為被控對象;以模糊PI為智能控制策略;以霍爾電流傳感器
傳感器
凡是利用一定的物性(物理、化學、生物)法則、定理、定律、效應等把物理量或化學量轉變成便于利用的電信號的器件。傳感器是測量系統中的一種前置部件,它將輸入變量轉換成可供測量的信號”。按照Gopel等的說法是:“傳感器是包括承載體和電路連接的敏感元件”,而“傳感器系統則是組合有某種信息處理(模擬或數字)能力的系統”。傳感器是傳感系統的一個組成部分,它是被測量信號輸入的第一道關口。 [全文]
及光電編碼器為檢測手段,利用DSP速度快、運算能力強、資源豐富的優勢,對無刷直流電機的控制與應用進行了研究。
2 系統結構設計
系統由“PC上位機、TMS320LF2407 DSP控制器、功率驅動模塊、無刷直流電機、檢測單元、通訊接口”等組成,如圖1所示。

2.1 DSP控制器
TMS320LF2407是一種具有高速的運算能力與面向電機高效控制的數字信號處理器,集成了針對電機控制所需要的CPU、片內RAM、ROM/FLASH、SCI、事件管理器等功能模塊資源。CPU具有獨立的數據總線和地址總線,高速的運算能力,可完成復雜的控制算法與先進的控制策略;SCI串行通訊接口與PC上位機進行實時通訊,完成程序設計、數據采集及上位監控等功能;事件管理器的通用定時器用于產生電流和速度控制周期;16位脈寬調制PWM通道產生的信號供給驅動模塊IGBT,通過調整PWM的占空比,進行電壓自動調節,實現對無刷直流電機的轉速和電流的控制;10位A/D轉換接口用于測量電機的定子電流;正交編碼器接口QEP用于接收光電編碼器的反饋信號并計算轉速;5個外部實時中斷用于電機驅動保護和復位;3個捕捉單元可對電機轉子位置進行檢測等,這些資源為實現無刷直流電機數字化、智能化的研究與應用提供了極大方便,也是目前具有競爭力的數字電機控制器。
2.2 無刷直流電機
采用1500轉/分,1.78A,27V電壓供電的無刷直流電機,定子為三相對稱繞組,轉子是永磁體結構,采用星形接法兩相通電三相6狀態運行方式。當定子繞組兩相通上方波電流產生的磁場與轉子永磁磁場垂直時,則產生最大的電磁轉矩驅動轉子旋轉。隨著轉子的旋轉定子電流需要不斷換相,才能保證兩個磁場下的電流方向不變,因此通過控制三相定子電流的通電順序和大小,就可實現電機轉速的控制。
2.3 功率驅動模塊
功率驅動采用東芝公司的IPM模塊,包括驅動電路、逆變電路及保護電路,逆變電路采用6單元IGBT三相星形全橋連接驅動方式。利用高速光耦
光耦
光耦全稱是光耦合器,英文名字是:optical coupler,英文縮寫為OC,亦稱光電隔離器,簡稱光耦。它對輸入、輸出電信號有良好的隔離作用,所以,它在各種電路中得到廣泛的應用。目前它已成為種類最多、用途最廣的光電器件之一。 [全文]
TLP550實現隔離驅動,使用事件管理器EVA的PWM脈沖信號控制逆變器
逆變器
逆變器(inverter)是把直流電能(電池、蓄電瓶)轉變成交流電(一般為220v50HZ正弦或方波)。應急電源,一般是把直流電瓶逆變成220V交流的。通俗的講,逆變器是一種將直流電(DC)轉化為交流電(AC)的裝置。它由逆變橋、控制邏輯和濾波電路組成.廣泛適用于空調、家庭影院、電動砂輪、電動工具、縫紉機、DVD、VCD、電腦、電視、洗衣機、抽油煙機、冰箱,錄像機、按摩器、風扇、照明等 。 [全文]
的工作狀態,再根據轉子磁極的位置進行電機定子電流實時換相的邏輯控制;通過調節PWM脈沖的占空比可改變電機繞組的平均電壓,從而控制定子電流的大小;使用可編程PWM死區控制可以防止逆變橋短路的現象。
2.4 定子電流檢測
電流檢測采用2個霍爾電流傳感器CSNE151,分別檢測A、B兩相的相電流(因為任一時刻只有兩相通電),再整合成一直流電流,經濾波后送DSP的A/D轉換模塊,則系統可采用一個電流調節器對電機的電流進行閉環控制。
2.5 位置檢測與速度計算
轉子位置是通過3個互差120°脈沖寬度為180°的霍爾位置傳感器
位置傳感器
位置傳感器可分為兩種,直線位移傳感器和角位移傳感器。其中直線位移傳感器常用的有直線位移定位器等,具有工作原理簡單、測量精度高、可靠性強的特點;角位移傳感器則可選旋轉式電位器,具有可靠性高、成本低的優點。角位移器還可使用光電編碼器,,有增量式與絕對式兩種形式。其中增量式碼盤在機器人控制系統中得到了廣泛的應用。 [全文]
,來實時檢測轉子磁極位置的6個循環變化狀態,每個60°電角度對應電機的某一對磁極下的一個位置,轉子位置狀態每變化一次,繞組導通就改變一次。A、B兩路脈沖信號送入DSP的正交編碼脈沖接口單元QEP的QEP1和QEP2引腳,經譯碼邏輯單元產生時鐘信號CLK和轉向信號DIR,將CLK作為定時器1的時鐘輸入,由T1對CLK進行脈沖計數,可以產生60°電角度脈沖信號的中斷。即根據霍爾位置傳感器的狀態信息,結合換相邏輯,DSP控制逆變器的導通或截止,從而控制電機定子繞組電流的換相。
速度檢測采用2000個脈沖/每轉的E6B2光電編碼器,直接將電機角度的模擬信號轉換成脈沖信號,分別用定時器設置控制周期和對脈沖進行計數,實現鑒相、倍頻、轉速測量與閉環控制功能。系統各檢測狀態與換相邏輯如表1所示。
3 控制系統設計
3.1 系統方框圖
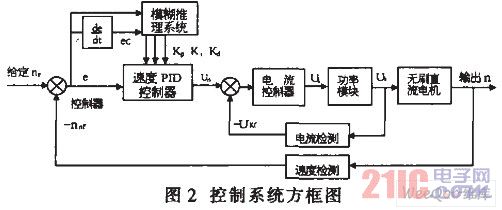
控制系統采用速度、電流雙閉環控制,速度環的作用是增強系統對負載變化的抗干擾能力,抑制轉速波動,為提高系統的動態和靜態性能,速度環控制器采用模糊自整定PID控制算法。電流環使電流緊緊跟隨速度控制器的輸出,對系統的擾動起抗干擾作用,為此電流環控制器采用PID控制算法,DSP通過速度環和電流環實時調節PWM的占空比來實現轉速的控制。模糊自整定PID與PID控制算法的有效結合,使系統具有較強的適應性,確保速度主被控量的控制質量。
控制系統方塊圖如圖2所示,其中nr為系統速度給定量;Un為速度控制器輸出的控制量;Ui為電流控制器輸出的控制量;UKf為電流環反饋量;Uk為功率模塊
功率模塊
功率模塊是功率電子電力器件按一定的功能組合再灌封成一個模塊。 [全文]
輸出的控制量;nnf為速度環反饋量;n為速度環的被控量。
3.2 模糊子集及隸屬函數
速度環控制器的轉速給定nR和轉速反饋值nnf的誤差e(E)和誤差變化率ec(EC)作為模糊控制器的輸入,以Kp、Ki、Kd作為輸出,找出PID與誤差E和誤差變化率EC的模糊關系,運行中不斷檢測E和EC,再根據模糊控制控制原理對PID進行在線調整,以滿足不同的E和EC下被控過程對△Kp、△Ki、△Kd的要求。
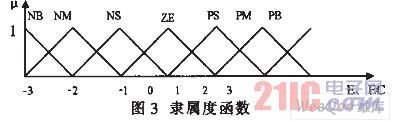
模糊子集為E=EC=△Kp=△Ki=△Kd=﹛NB,NM,NS,ZE,PS,PM,PB﹜=﹛負大,負中,負小,零,正小,正中,正大﹜;輸入變量論域為E=EC=﹛-3,-2,-1,0,1,2,3﹜;輸出變量論域為△Kp=﹛-0.3,0.3﹜,△Ki=﹛-0.08,0.08﹜,△Kd=﹛-3,3﹜。隸屬度函數采用靈敏性較強的三角函數,E、EC隸屬度函數如圖3所示。
3.3 模糊控制規則設計
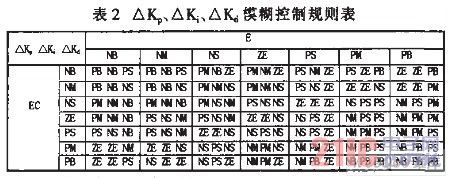
速度環模糊控制規則采用if(條件) and then(結果)的形式表達,根據經驗并通過反復調試得到下述49條控制規則,模糊控制規則如表2所示。
(1) if E is NB and EC is NB then △Kp is PB,△Ki is NB,△Kd is PS;
(2) if E is NB and EC is NM then △Kp is PB,△Ki is NB,△Kd is NS;
┋
(49) if E is PB and EC is PB then △Kp is NB,△Ki is PB,△Kd is PB。
3.4 模糊推理與模糊判決
根據模糊控制規則,求出△KP、△Ki、△Kd的隸屬度P△K、i△K、d△K;采用加權平均法計算出輸出量△Kp、△Ki、△Kd的確定值;再將Kp、Ki、Kd的代入PID控制算法中,計算出速度環輸出的控制量Un,完成了PID參數的在線自整定過程。
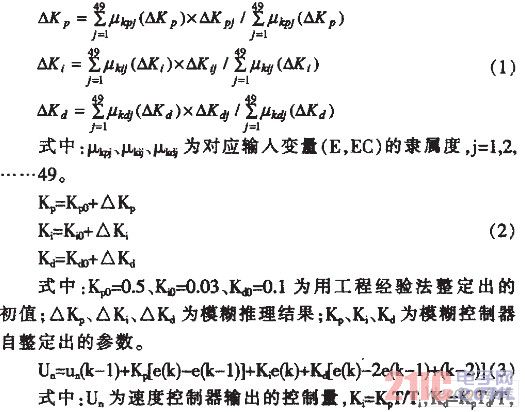
T=10ms為采樣周期。
3.5 控制程序設計
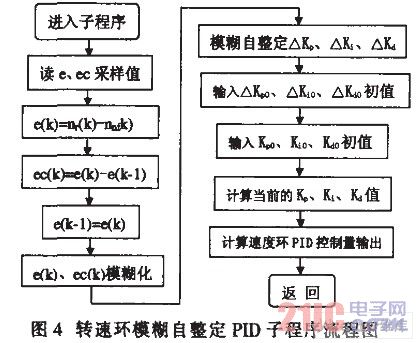
在TMS320LF2407 DSP控制器上,采用C語言和模塊化設計方法,設計出速度控制器和電流控制器的應用程序,包括主程序、模糊自整定PID子程序、PID程序、中斷子程序等,完成初始化、參數給定、數據采集、運算與轉換、控制算法、控制量輸出、PWM與ADC中斷、邏輯換相、故障檢測等,實現了對直流無刷電機的實時控制。模糊自整定PID子程序如圖4所示。
4 通訊與監控系統設計
采用現場總線Modbus和上位監控技術,設計了通訊與監控系統的硬件電路和軟件程序。用C語言和中斷程序法設計了下位機通訊程序,包括端口初始化、確定通訊波特率、校驗位、奇偶位、地址等。用VB語言的通訊控件MSComm對通訊端口進行初始化和通訊格式確定,并應用面向對象的程序方法設計了上位監控系統,包括系統命令、趨勢組態、功能組態、狀態檢測等,如按下系統命令中的“參數設置”功能按鈕,可進行速度給定nr,Kp0、Ki0、Kd0初值等值的設定;按下“顯示設置”可觀察Kp、Ki、Kd、n等實時參數。實現了上、下位機通過現場總線Modbus進行信息交換,人-機界面友好,操作方便靈活。
5 系統調試結果
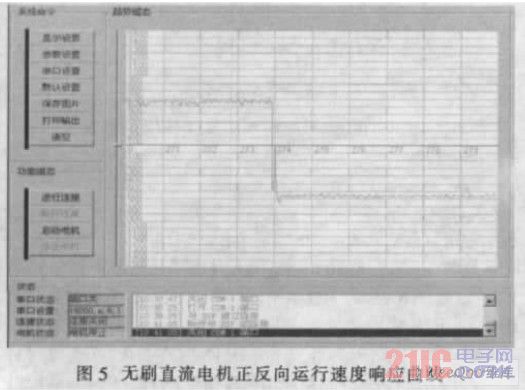
系統速度環給定為650轉/分,啟動并運行系統,由上位機監控的可視化運行曲線可知,速度響應快,無超調,調節時間短,能快速實現正、反向運行,獲得了較好的的起動性能與運行性能,滿足了無刷直流電機系統對速度調節的平穩性和快速性的要求,轉速特性如圖5所示。
6 結束語
本文的創新點是融合了“現場總線,智能控制,數字檢測,上位監控”等多種先進技術,充分利用了DSP速度快、運算能力強、資源豐富的優勢;發揮了模糊自整定PID和PID控制算法的優勢,使系統具有較快的響應速度和抗參數變化的魯棒性;設計的通訊與上位監控系統,實現了系統的實時監控與遠程控制,方便靈活,實際調試結果證明了該設計的有效性。我所研制的DSP實踐開發系統已在高校和企業培訓中心得到了應用,并具有較好的推廣前景