
電子科技大學自動化工程學院 王俊麗 王志剛
引 言
美國WindRiver公司于1983年設計開發的VxWorks操作系統是一種嵌入式實時操作系統(RTOS),是嵌入式操作系統的典型代表,它的高可靠性、可剪裁性、強實時性被廣泛的應用在軍事、通信、航空、航天等高精尖技術及實時性要求極高的領域中,如衛星通訊、軍事演習、導彈制導、飛機導航等。BSP(Board Support Package)在VxWorks操作系統中起到了部分接口的驅動和硬件初始化的作用,它是生成bootrom和VxWorks映像文件的前提,而S3C2440是Samsung公司設計的ARM920T系列的核心處理器,是嵌入式領域比較常用的ARM處理器。因此,研究基于S3C2440平臺上的Vxworks BSP移植具有重要的意義。本文就BSP的概念、BSP移植過程中重點修改的幾個文件、串口和網口驅動以及BSP的調試和仿真做詳細的介紹。
BSP概述
VxWorks操作系統將所有硬件的功能函數分別放到一系列庫中,這些庫就被稱為板級支持包BSP。BSP是連接VxWorks操作系統與硬件平臺的一個接口軟件包,在引導系統、支持系統運行過程中扮演著重要的角色,首先,通過BSP可以生成引導操作系統的bootrom;其次,引導行工程的建立基礎就是BSP;最后,BSP具有與用戶交互的作用,可以提供一個基礎的硬件調試環境。BSP還可以使VxWorks運行于特定的硬件平臺,如ARM、PPC、X86等,它包含了一系列與硬件相關的函數,完成針對硬件的基本輸入與輸出操作,可以使上層程序員在不用熟悉硬件的情況下進行編程。例如,一般它完成以下操作:目標板硬件初始化、內存控制器初始化、堆棧初始化、外圍設備初始化(I/O、Interrupt……)、異常向量處理、CACHE操作、硬件設備的底層驅動、定時器驅動、串口驅動、END網絡驅動、FLASH驅動、LCD驅動等。
BSP在嵌入式系統中扮演的角色,很類似于在PC系統中的BIOS和驅動程序的地位。圖1中包括了VxWorks操作系統的各種組件,指明了BSP在整個系統中所處的地位和作用。
VxWorks在S3C2440上的BSP設計
S3C2440簡介
移植目標機的硬件配置具體如下:處理器S3C2440,采用ARM920T內核,內存大小64M;NAND Flash大小為128M;
NOR Flash大小為2M;3路URAT;2路SPI;IIC總線接口;網卡:DM9000,10/100M的自適應。
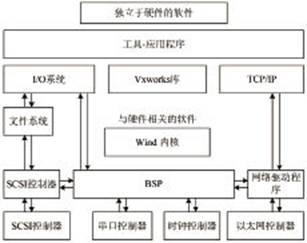
圖1 BSP在嵌入式系統中的位置框圖
BSP的移植過程
要進行BSP的開發和設計,最好有一個可參考的模板,由于Samsung S3C2440A的內核是ARM920T,所以參考的模板選擇Tornado for arm 的integrator920t。BSP文件主要在VxWorks編譯環境Tornado的目錄target/config/all和target/config/integrator920t文件夾中。其中,all文件夾里的文件對于絕大多數BSP都是共用的,一般來說不用怎么修改,重點是修改integrator920文件夾下的幾個文件,這主要是指makefile、config.h、rominit.s和sysLib.c中相關部分的修改,另外添加了串口驅動和DM9000的網卡驅動。
修改Makefile文件
Makefile的兩個主要功能就是提供文件之間的依賴關系和目標文件生成方法,定義編譯和鏈接整個BSP的規則,在makefile文件中有一些參數已經在config.h文件中定義過了,但是必須保證兩處的定義一致,否則會出現編譯錯誤。下面介紹一些需要修改的參數:
CPU:描述目標板的處理器類型,設計中為ARMARCH4;
TOOL:該參數用來選擇編譯工具,VxWorks中可使用GNU和DIAB兩種,設計中用GNU編譯器來編譯目標代碼;
TGT_DIR:默認設置為$(WIND_BASE)/target;
TARGET_DIR:默認為BSP所在的目錄,設計中為mini2440;
VENDOR:板卡生產商的名稱,設計中為HITSAT;
BOARD:板卡的名稱,設計中為OMU;
ROM_SIZE:ROM或Flash的大小(十六進制);
RAM_LOW_ADRS:VxWorks在RAM中的起始地址,即入口地址;
RAM_HIGH_ADRS:非駐留ROM內核的啟動程序加載地址。關于入口地址和高位地址的指定需參考硬件的RAM組織。
該文件下其余的設置和定義都與模板中的一致。
修改config.h
config.h文件是BSP軟件中比較重要的一個文件,VxWorks內核組件的配置可以通過config.h文件來定義。config.h文件包含了所有頭文件和CPU相關的特殊定義,config.h文件中的配置參數是在configAll.h文件內容的基礎上根據開發板的硬件資源設置的,其中包括定義引導行、修改存儲空間的地址等。下面詳細介紹config.h文件中修改的部分配置參數:
(1)定義引導行
#define DEFAULT_BOOT_LINE "dm(0,0) zwj-PC:d:\VxWorks h=192.168.0.1 e=192.168.0.2 u=zwjhjj pw=zwjfile tn=mini2440"
其中:dm(0,0)為boot device,即啟動設備映像;
zwj-PC為host name,即主機名;
d:\VxWorks為file name,即要下載的VxWorks鏡像文件路徑;
h=192.168.0.1為主機IP地址;
e=192.168.0.2為目標板IP地址;
u=zwjhjj為FTP登陸時的用戶名;
pw=zwjfile為FTP登陸時的密碼;
tn=mini2440為目標板名稱。
(2)修改地址
對目標板存儲區配置參數的修改時一定要注意:該文件中地址定義,如ROM-TEXT-ADRS、ROM-SIZE、RAM-LOW-ADR、SRAM-HIGH-SIZE等要與Makefile文件中的相關定義一致。根據實際CPU以及外擴存儲器的大小來確定目標板內存。
#define LOCAL_MEM_LOCAL_ADRS 0x30000000 / *RAM的起始地址*/
#define LOCAL_MEM_SIZE 0x04000000 /*RAM的大小為64M*/
#define ROM_BASE_ADRS 0x00000000 /*Flash的基地址*/
#define ROM_SIZE0x00100000 /*存VxWorks的Flash大小*/
#define ROM_COPY_SIZE ROM_SIZE
#define ROM_SIZE_TOTAL 0x00200000 /*Flash總大小*/
#define RAM_LOW_ADRS 0x30001000 /*VxWorks 映像的入口地址*/
#define RAM_HIGH_ADRS 0x32e00000 /*Bootrom在RAM中的起始地址*/
修改S3C2440x.h
該文件是自己添加的一個文件,其中包括處理器相關的外設寄存器結構、地址、外設中斷號分配、串口等的設置。下面主要介紹一下該文件中對串口的定義:
/* s3c2440串口的定義*/
#define UART_XTAL_FREQ s3c2440x_PCLK
/*串口時鐘頻率*/
#define N_s3c2440x_UART_CHANNELS 3 /*串口通道數 */
#define N_SIO_CHANNELS N_s3c2440x_UART_CHANNELS
#define N_UART_CHANNELS N_s3c2440x_UART_CHANNELS
#define UART_0_BASE_ADR 0x50000000 /*串口0的基地址*/
#define UART_1_BASE_ADR 0x50004000/*串口1的基地址*/
#define UART_2_BASE_ADR 0x50008000/*串口2的基地址*/
另外又添加了一個s3c2440xSio.h文件,在該文件中定義了串口數據結構:
typedef struct s3c2440x_CHAN
{ SIO_CHAN sio; /* 標準SIO_CHAN結構 */
STATUS (*getTxChar) (); /*安裝發送回調函數 */
STATUS (*putRcvChar) (); /*安裝接收回調函數 */
void * getTxArg;
void * putRcvArg;
…….
UINT32 channelMode; /*當前模式(中斷或輪詢)*/
int baudRate; /*當前波特率*/
}
數據結構初始化之后,還有幾個重要的函數需要注意:sysHwInit():處理器I/O端口的初始化;sysSerialHwInit():初始化設備描述符;sysSerialHwInit2():通過intConnect()把串口的中斷處理程序s3c2440xIntTx、s3c2440xIntRcv連接接到相應的中斷向量上,并由int Enable()開啟兩個中斷,調用s3c2440xDevInit2()對_UCON寄存器賦值完成對串口的最終配置由輪詢模式轉換為中斷模式,并在中斷服務程序中實現串口數據的接收和發送。通過對這些功能函數的添加完成串口驅動的設計。
修改romInit.s
部分代碼修改如下:
/*添加了對串行口UART的初始化,配置了UART的一些控制寄存器,并設置了波特率,部分代碼如下*/
InitUART:
#define UART_BRD (( 50750000 / (115200 * 16)) - 1)
mov r2,#UART_BRD /*設置串口的波特率 */
/*初始化堆棧指針*/
ldr sp, L$_STACK_ADDR
mov fp, #0
在建立堆棧之后,系統就具備了高級語言的執行條件,后續的代碼就可以用C語言來實現了。
/*使程序跳轉至C語言程序段代碼如下*/
#if (ARM_THUMB)
ldr r12,L$_rStrtInRom
orr r12,r12, #1
bx r12
#else
ldr pc,L$_rStrtInRom /*跳轉到romStart()中執行*/ #endif
CPU將執行權轉移給romStart()之后。該函數就使內存清空,然后把整個引導映像復制到內存中,最后將CPU的控制權交給usrInit()。
修改sysLib.c
文件sysLib.c提供VxWorks和應用程序間的板級聯系,這里重點介紹一下內存映射函數。
目標系統開啟了MMU模塊,BSP在sysLib.c文件里面就定義了一個sysPhysMemDesc[ ]表。部分代碼如下所示:
PHYS_MEM_DESC sysPhysMemDesc [] =
{ (void*) (ROM_BASE_ADRS+0xf0000000), (void *) (ROM_BASE_ADRS),
ROUND_UP(ROM_SIZE_TOTAL*2,PAGE_SIZE),
VM_STATE_MASK_VALID|VM_STATE_MASK_WRITABLE|VM_STATE_MASK_CACHEABLE,
VM_STATE_VALID|VM_STATE_WRITABLE_NOT|VM_STATE_CACHEABLE_NOT
}
上面一小段代碼是對ROM_BASE_ADRS 的內存映射,ROM_BASE_ADRS+0xf0000000是要映射的虛擬地址,ROM_BASE_ADRS是硬件設計時定義的實際物理地址,ROUND_UP(ROM_SIZE_TOTAL*2,PAGE_SIZE)是映射長度,VM_STATE_MASK_VALID|VM_STATE_MASK_WRITABLE|VM_STATE_MASK_CACHEABLE是可初始化的地址狀態,VM_STATE_VALID|VM_STATE_WRITABLE_NOT|VM_STATE_CACHEABLE_NOT是實際初始化的地址狀態。
若添加新的外設,該外設對應的內存空間必須在sysPhysMemDesc[]中配置。通過這樣的配置就完成了內存映射和MMU的開啟。
修改dm9kEnd.c
由于S3C2440使用的是DM9000網卡。要做好DM9000網卡的END驅動首先要初始化網卡的數據結構dm9kDevice,這個數據結構如下:
typedef struct dm9kDevice
{
END_OBJ endObj; /*繼承類 */
int unit; /*設備單元號 */
UINT32 flags; /* 本地標志信號*/
int ivec; /* 中斷向量 */
int ilevel; *中斷級 */
……
} DM9K_DRV_CTRL
數據結構中的END_OBJ類型成員、網卡單元號、中斷號和中斷向量是網卡驅動中必須包含的成員元素。
驅動的部分接口函數,主要包括網卡加載函數dm9kEndLoad、網卡啟動函數dm9kStart、停止網卡函數dm9kStop、網卡控制函數dm9kIoctl、網卡卸載函數dm9kUnload、網卡發送函數dm9kSend、獲取組播地址函數dm9kMCastGet、啟動輪詢模式函數dm9kPollStart、關閉輪詢模式函數dm9kPollStop、輪詢模式發送函數dm9kPollSend、輪詢模式接收函數dm9kPollRcv等,通過對這些接口函數編寫功能,實現網卡驅動。
在編寫驅動的過程中,還必須注意:由于目標板用一種100pin的DM9000芯片,這種芯片除了有CMD信號之外,還有6根地址片選信號SA4~SA9,根據SA4~SA9對應的CPU地址線和數據手冊上引腳定義,可以計算出網卡的端口地址,如果SA4~SA9對應CPU地址的addr4~addr9,那么網卡端口基址就是0x18000300,這樣可以計算出網卡的基地址。

圖2 VxWorks COM1口的打印信息
BSP的調試與仿真
BSP修改完成以后,就要進行調試了,這里采用點亮LED燈的調試方法,寫一段點燈程序,用BSP生成bootrom和VxWorks映像,使用H-JTAG軟件將bootrom燒寫進目標板的norflash中,通過在不同位置反復的調用點燈程序和燒寫bootrom到norflash中來調試BSP,并通過串口查看調試信息,如圖2所示,是操作系統啟動過程中,經過串口傳輸到主機上打印的調試消息,通過這些信息可以判斷出系統啟動過程中哪一部分出現了問題。
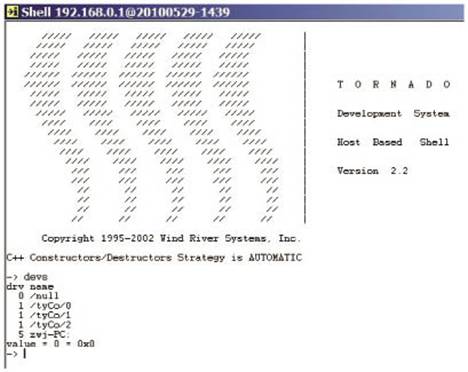
圖3 VxWorks Shell界面
系統上電之后,bootrom首先運行,然后通過網線將VxWorks映像文件下載進rom中,圖3所示為VxWorks的Shell界面,顯示設備列表有串口和網口,表明串口和網口驅動成功。
GEC