目前,我國普遍采用的倒車裝置是超聲波倒車雷達,這種裝置雖能準確測量車尾與車后障礙物的距離,但由于存在視覺盲區,司機無法判斷障礙物的確切位置,更不能感知地坑或低矮障礙物。國內外研究趨勢是在倒車雷達的基礎上采用數字圖像處理技術,利用強大的嵌入式處理器,開發用于檢測車后物距和監視車后圖像的優點相結合的車載可視倒車裝置。這類新型裝置的價格較高,目前僅在中高檔轎車上使用。為此,提出了基于IntelPXA270硬件平臺及嵌入式WindowsCE操作系統的車載可視倒車裝置。
1 系統結構
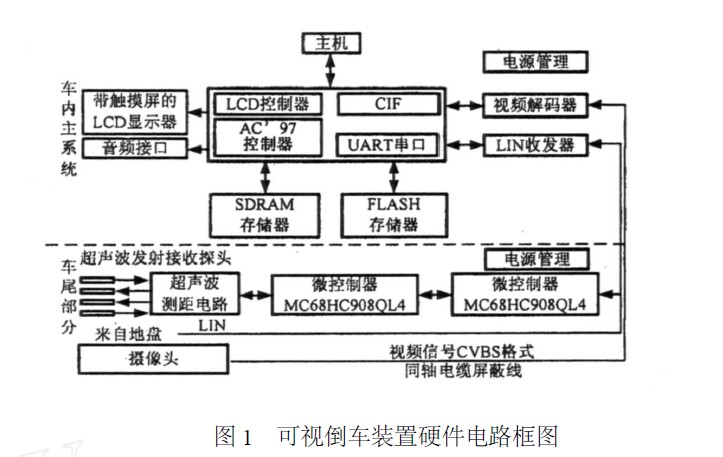
本文提出的可視倒車裝置硬件電路框圖如圖1所示,主要由Intel嵌入式處理器PXA270、視頻采集、超聲波測距等電路組成。兩對超聲波換能器、信號調理電路和微控制器完成對障礙物的距離測定,并通過LIN總線發送至車內主系統;攝像頭采集到的視頻復合信號通過同軸電纜送至視頻解碼芯片進行A/D轉換,并產生YUV422格式的視頻信號輸入PXA270的快速捕捉攝像頭接口;主系統處理器利用字符疊加技術,在TFTLCD屏上將含有障礙物距離等參數的圖像信號播放出來。
1.1 嵌入式處理器PXA270
本系統所采用的嵌入式處理器PXA270其最高主頻達624MHz,加入了WirelessMMXTM技術,從而提升了多媒體處理能力,同時還加入了IntelSpeedStep動態電源管理技術,在保證CPU性能的情況下,最大限度地降低移動設備功耗;并擁有豐富的外部接口:如AC’97控制器、LCD控制器、CIF接口、SD卡接口等。
1.2 視頻采集電路
車內主處理器PXA270的CIF接口只能處理數字信號,因此必須先將攝像頭采集到的模擬信號進行轉換。本系統的視頻輸入解碼模塊使用TI公司的視頻解碼芯片TVP5150及外圍電路構建,其主要功能是將每一路CCD攝像頭采集的標準PAL制電視模擬信號發送至視頻解碼器,完成視頻圖像的箝位及抗混疊濾波等預處理、模擬視頻信號到數字YUV4:2:2的轉換及亮度/色度、水平/垂直同步等信號的分離。解碼芯片和PXA270通過CIF接口連接,PXA270通過I2C總線訪問TVP5150的內部寄存器,協調處理器與解碼器之間的工作交流。
1.3 超聲波測距電路
測距電路主要由超聲波發射電路和接收電路組成,原理框圖如圖2所示。該模塊單片機選用Freescale公司的MC68HC908QL4,該芯片可靠性高、抗干擾能力強,內含4kB閃速存儲器,四通道10位A/D轉換器,并集成了LIN控制器。超聲波探測車物之間的距離,并將數據經LIN總線傳送至車內主處理器。由于超聲波測距只在汽車倒車時為駕駛員提供車后信息,而倒車時車速較慢,與聲速相比可認為是靜止的,因此采用脈沖測距法,只測量超聲波在測量點與目標間的往返時間計算距離較簡單。
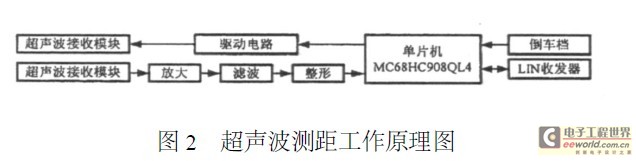
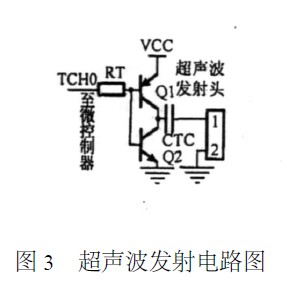
(1)超聲波發射電路超聲波發射電路如圖3所示。當汽車駕駛員手柄轉到倒車檔時,測距電路開始工作,微控制器發出40kHz方波信號,經驅動電路放大后,通過探頭發射出去,此時計數器開始計數。
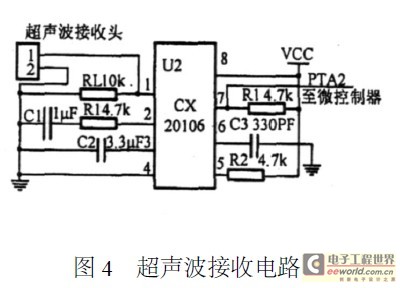
(2)超聲波接收電路超聲波接收電路如圖4所示。采用專用前置放大器CX20106,由前置放大器、限幅放大器、帶通濾波器、檢波器、積分器、整型電路組成。其中,前置放大器具有自動增益控制功能。超聲波信號在空氣中傳播遇到障礙物后發生反射,回波經接收探頭接收并轉換成電信號,經條理電纜,輸入到微控制器的外部中斷口,使計數器停止計數,從而計算出障礙物的距離。
1.4 LIN總線收發器接口電路設計
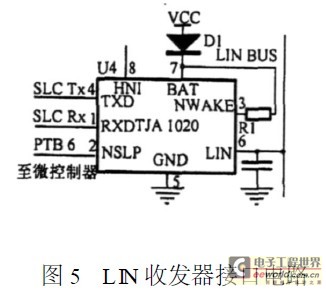
LIN是一種低成本的串行通訊網絡,用于實現汽車中的分布式電子系統控制,是一種輔助的總線網絡,在不需要CAN總線的帶寬和速度的場合可大大節省成本。LIN通訊是基于SCI異步串行通信的數據格式,采用單主控制器/多從設備的模式,僅使用一根12V信號總線和一個無固定時間基準的節點同步時鐘線。TJA1020是常用的LIN主/從協議控制器和LIN總線的物理接口芯片,接口電路如圖5所示。
2 軟件設計
2.1 系統平臺的定制
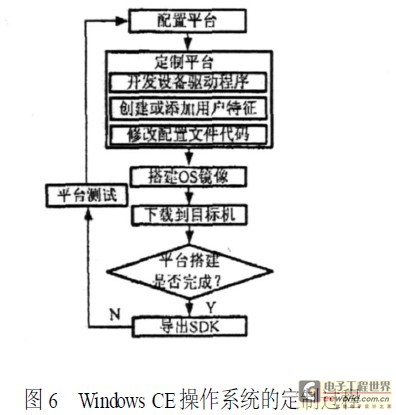
WindowsCE是微軟專門為各種嵌入式系統設計的一種高效、可升級的操作系統,廣泛用于各種嵌入式產品。為定制該裝置的WindowsCE操作系統,首先根據硬件配置,在PlatformBuilder開發環境中導入Intel提供的BSP板級支持包,并開發自己的OEM硬件適配層、組件。操作系統映像建立成功后,再將平臺傳輸到目標設備進行測試。最后輸出軟件開發工具包,在EVC++環境中開發應用程序。
WindowsCE定制過程如圖6所示。
2.2 攝像頭驅動程序設計
本文述及的驅動是在WindowsCE下實現的。攝像頭驅動程序的主要任務是控制視頻數據在硬件中流動,并為攝像頭應用程序提供標準接口。為簡化編程難度,考慮到CIF接口的工作方式比較獨立,采用類型為流接口驅動的單片驅動程序模型:即為每一個流接口驅動創建一個包含驅動程序的入口點動態鏈接庫,實現文件I/O和電源管理函數交給內核使用。
攝像頭驅動程序的流程圖如圖7所示,其工作內容如下:
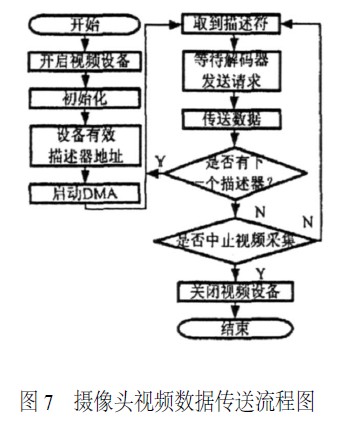
(1)負責通過I2C總線查詢攝像頭解碼器的信息,調節攝像頭解碼器的設置;
(2)建立和控制DMA傳輸通道,通過DMA方式將CIF接口中的3個FIFO內的數據信息傳送到內存中,從而實現快速高質量的數據傳送;
(3)提供可以給應用程序使用的接口。
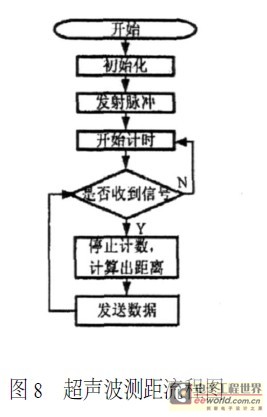
2.3 超聲波測距軟件設計
超聲波測距軟件主要包括測距及數據發送,其流程圖如圖8所示。
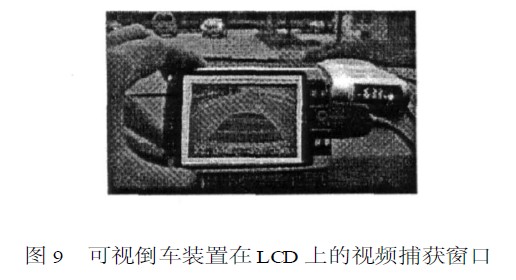
3 結果
軟硬件聯合調試成功后,在實際車輛上進行了倒車試驗。攝像頭實際捕捉到的視頻信號在LCD上的顯示結果如圖9所示。圖9中數字為超聲波測距數據。試驗表明,該系統運行可靠,倒車時不但能清晰實時顯示車后全景,而且還能準確測量汽車與車后障礙物之間的距離,基本達到了設計要求。