
摘 要: 在TIG焊逆變電源的實時檢測電弧電流控制系統中建立電弧電流模糊控制算法。采用雙輸入單輸出的模糊控制器模型,即采用電弧電流的變化及其變化率作為模糊控制器的兩個輸入量,把調節移相式PWM脈寬的輸入電壓作為模糊控制器的輸出量。給出了單片機模糊控制的總體框圖,并詳細介紹了對應模糊控制器的設計過程。
關鍵詞: 模糊控制 單片機 電弧電流 TIG逆變電源
采用TIG焊接方法焊接薄壁結構時,人們最關注的是焊接電源的引弧性能和電弧穩定性。然而,由于存在著各種因素的影響,如:電弧長度、工作平面不平、氣體介質的壓力、氣體流量的變化、焊槍相對焊縫表面距離的變化及供電網電壓波動等,都會使系統偏離平衡點。如果系統具有快速自動返回平衡點的能力,則電弧可維持穩定燃燒,這里,控制系統是弧焊逆變電源的核心,是影響其工作穩定性和可靠性的重要方面。
針對焊接過程具有非線性、時變形和不確定性,電弧穩定控制存在一系列模糊特征。故使用應用前景十分廣泛的模糊控制理論,再配以單片微機控制系統對TIG焊接的電弧電流實行穩定控制,結果表明:具有控制精度高,電弧燃燒穩定,對焊接參數變化適應性強的特點。
1 電弧電流的模糊控制系統組成
TIG焊機的模糊控制系統的設計思想是:實現逆變電源的恒流外特性,即用于檢測電弧電流的霍爾傳感器實時地把電流轉化為對應的電壓,該電壓經A/D轉換后送微機,與事先給定的電流值進行比較。CPU根據其偏差和偏差率,運行固化在EPROM中的模糊控制程序,由D/A輸出控制信號給移相式PWM,移相控制電路不斷地調整逆變電源中兩橋臂功率開關器件IGBT移相角的大小,確定功率開關器件的導通脈沖寬度,改變輸出電壓的大小,從而實現對輸出電流的控制。

系統的總體結構框圖如圖1所示。以高速單片機80C51FA作為系統的核心,外配81C55作擴展接口,實現與鍵盤的通訊,通過鍵盤設定焊接方式、焊接功能及各種焊接參數指標,采用DS80C320作D/A片,其輸出經UA741放大器,放大器的功效是用來調整電壓以滿足PWM輸入(1.7~5.2V)的范圍,移相式PWM采用UC3875,用來調整IGBT的導通脈寬,PWM控制器內部設有電路保護措施,為保證PWM高頻(20kHz)開關控制信號可靠地傳輸,采用高速光耦合器TLP559,其開關速度可達1MHz,這樣有利于將強電與弱電隔離,同時,為保證信號有足夠大的驅動能力,采用74CH4050作同相驅動器,由于霍爾元件本身已經實現強電和弱電的隔離,故在信號輸入時不必加隔離器,A/D片采用AD574A,具有高速轉換速度,AT24C01作E2PROM,用以記憶鍵盤輸入的各種參數,內存由單片機和81C55的內存協調解決,LCD液晶顯示器采用菜單和圖形兩種方式,顯示系統工作狀態和焊接順序、指標參數等,用ACM-24064A芯片來完成,采用32K的EPROM27C256和IMP815L作μp電源監視及運行管理,動作開關服務于起弧和收弧。
2 模糊控制器設計
本系統采用典型的兩輸入單輸出的模糊控制器,其結構如圖2所示,主要由三部分組成:精確量的模糊化;模糊推理規則的構成;輸出信息的模糊決策。

2.1 語言變量的確定
2.1.1 模糊控制器的輸入輸出定義
模糊控制器輸入定義為:e=Ig-If,ec=(e(n)-e(n-1))/T;式中e為電弧電流的偏差;ec為其偏差的變化率;Ig為電弧電流給定值;If為電弧電流采樣值;e(n)為nT時刻誤差;e(n-1)為(n-1)T時刻誤差;T為采樣周期。
模糊控制器的輸出定義為:調節移相式PWM的脈沖寬度所對應的電壓校正量Δu。
有了上述的定義,則輸入語言變量定為E和EC,輸出語言變量為U。
2.1.2 量化因子Ke、Kec和比例因子Ku的選擇
根據本系統的特點和實際操作經驗,語言變量E、EC和U的基本論域選擇為:
e=[-3,3],ec=[-3,3],Δu=[-1.5,1.5]
三個語言變量E、EC和U的論域均設為[-6,6],由此可得到對應的量化因子和比例因子:
Ke=6/3=2,Kec=6/3=2,Ku=6/1.5=4
量化因子和比例因子大小的確定,取決于基本論域的選擇,它決定了最終控制的效果,如:超調量、響應時間、穩定性等,故基本論域一般事先初步地選取,在實際調試過程中需不斷修正,最終確定一個較滿意的結果。
2.1.3 語言變量的隸屬函數
三個語言變量分別對應三個模糊集 、
、 和
和 。鑒于計算上的方便,把、和劃分為7個模糊子集,它們分別是NL、NM、NS、O、PS、PM、PL,每個模糊子集的論域為[-6,6],語言變量的隸屬函數形狀對控制性能影響不大,故取三角形的分布函數,則E、EC和U從屬于每個模糊子集的隸屬函數如表1和表2所示。
。鑒于計算上的方便,把、和劃分為7個模糊子集,它們分別是NL、NM、NS、O、PS、PM、PL,每個模糊子集的論域為[-6,6],語言變量的隸屬函數形狀對控制性能影響不大,故取三角形的分布函數,則E、EC和U從屬于每個模糊子集的隸屬函數如表1和表2所示。


2.2 模糊推理
模糊控制器依據的模糊推理規則是模糊控制器的核心,模糊推理規則主要以人的控制經驗和控制思想為依據,本系統采用的電流推理規則為:當誤差為正大時,選擇控制量以盡快消除誤差為主,而當誤差較小時,以系統穩定為主要出發點,選擇控制量盡量防止超調;反之亦然,根據這一推理規則,便可獲得相應的控制策略,即對于每一對輸入量和就可得到一個相應的輸出量,見表3。

2.3 模糊判決
從上述模糊推理規則的輸出可以看出,仍是一個模糊量,必須將該模糊量經過模糊判決轉換成相應的精確控制量U。模糊判決的方法有很多,這里采用重心法解模糊量為精確量,其計算公式如下:
應用模糊推理的合成算法可以算出最終的控制作用表,見表4所列,這樣,在模糊控制過程中,由一組實際的輸入量e和ec,經過量化后,便可得出一個控制量,因此本系統根據13個E和13個EC相應得到一個13*13的控制表。
 ?
? 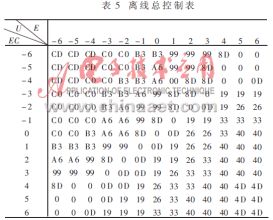
2.4 離線控制表
由于總控制表的計算工作量較大,且計算時間較長,為加快系統的響應速度,先將上述控制表采用離線計算形式,即轉換為表5,八位數字量的最高位設為符號位,把離線表先寫入微機的存儲器中,在實時控制中,只需通過查表的形式,便可獲得實時的控制量。
3 系統軟件設計
系統軟件設計可分四個部分:焊前準備,引弧控制、焊接階段控制、收弧控制,焊接階段控制主要是模糊控制,其程序流程見圖3,為了加快控制過程,縮短過渡時間,在程序中分兩個環節進行,當電流偏差大于A門限值時,系統進入加速控制過程,讓信號迅速逼近給定值;當偏差小于等于A門限值時,系統進入模糊控制環節,根據偏差和偏差變化率,量化后查詢模糊離線總控制表,取出控制量的增量,然后進行控制,A的大小由經驗得出。

(1)模糊控制作為一種新型的智能控制法,在焊接電弧電流的控制中能獲得良好的控制效果,具有控制精度高、無超調、動態品質好和魯棒性強的特點。
(2)采用單片機控制系統在滿足電弧電流模糊控制的要求下,具有成本低、控制靈活、可靠性高的特點。
參考文獻
1 逆變焊接與切割電源.北京:機械工業出版社,1995
2 余永權.單片機微機模糊邏輯控制.北京:北京航空航天大學出版社,1995
3 何立民.單片機應用系統設計.北京:北京航空航天大學出版社,1996
4 C.C.Lee.Fuzzy Logic in control system:Fuzzy Logic controller-part I.IEEE Trans.on System,Man and Cybernetics,1990,20(4)