
關鍵字:MPC860 STl6C654 串行通信
1 系統硬件設計
1.1 主要器件選型
1.1.1 MPC860型微處理器
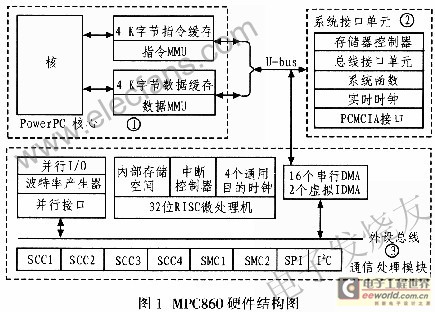
MPC860 PowerQIUCC(簡稱MPC860)內部集成了2個處理單元。一個處理單元是嵌入的PowerPC核(PowerPCCore),是主處理單元(CPU),是一個RISC芯片,通常編譯后的程序指令都是由它執行;另一個處理單元是通信處理模塊CPM(Communications Processor Module),內部集成有一個RISC微處理器,對各種常用的通信模塊進行管理。通信處理模塊內部集成有4個串行通信控制器SCC、2個串行管理控制器SMC、1個串行外圍接口電路SPI和1個I2C接口。另外,還有一個系統接口單元SIU,主要功能是提供內外總線的接口及一些其他功能(如SIU中斷)的管理等。本設計利用通信處理模塊CPM強大功能,與STl6C654通信。MPC860硬件結構如圖1所示。
1.1.2 STl6C654
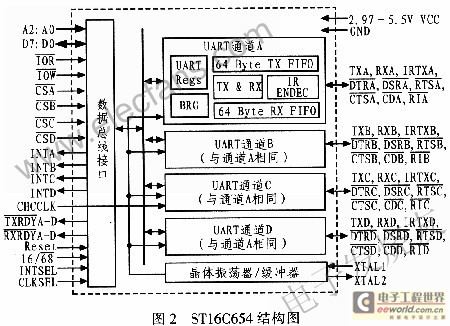
STl6C654是一個帶有收發各64 Byte的FIF0的擴展通用異步收發器,自動軟硬件流程控制,速率最高達到1.5 Mb/s(24 MHz時鐘),支持16(Intel)/68(Motorola)總線接口類型。STl6C654結構圖如圖2所示。擴展的4路串口通道,每個通道有15個(64/68pin封裝)或16個(100pin封裝)內部寄存器,用來存放收發數據以及配置該串口的工作模式,需要在初始化時對各寄存器進行配置。工作模式有中斷模式和定時查詢模式,中斷模式實時性能好,適合于緊急情況,中斷次數多,中斷任務切換頻繁影響主要任務的運行;定時查詢模式,由于STl6C654具有緩存,定時查詢方式具備一般實時性,數據不丟失。
1.2 系統組成
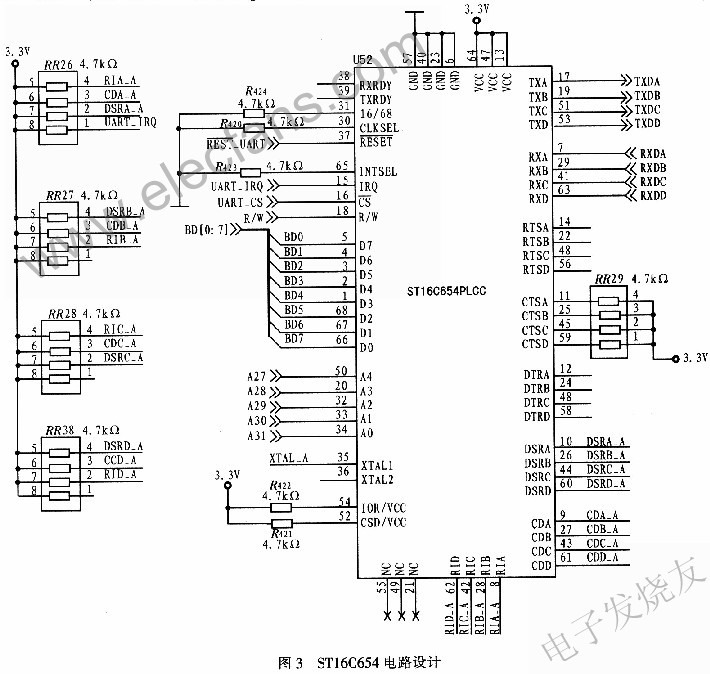
電路設計需要注意:1)MPC2860采用大端(big-end)工作模式,STl6C654從BD0開始接收數據。STl6C654數據總線D[0..7]連接MPC860的數據總線D[7..0],地址總線A[O..4]連接MPVC860地址總線A[31..27];2)STl6C654采用Motorola模式即![]() 接地,此時控制
接地,此時控制![]() 為0,就是對4路串口同時使能,選擇A3,A4就可以對具體通道操作;3)采用定時查詢模式,STl6C654的
為0,就是對4路串口同時使能,選擇A3,A4就可以對具體通道操作;3)采用定時查詢模式,STl6C654的![]() 與MPC860的
與MPC860的![]()
![]()
連接,![]() 與MPC860的
與MPC860的![]() 連接,
連接,![]() 置空,以實現了串口數據的接收后以UDP協議包發送到以太網和從以太網收到的UDP包數據按協議重打包后發送到指定端口;4)時鐘選擇為14.7654MHz,
置空,以實現了串口數據的接收后以UDP協議包發送到以太網和從以太網收到的UDP包數據按協議重打包后發送到指定端口;4)時鐘選擇為14.7654MHz,![]() 為O,但實際波特率要通過MCRBIT7初始化設置,各路傳輸速率最高可達921.6 Kb/s。STl6C654電路設計如圖3所示。
為O,但實際波特率要通過MCRBIT7初始化設置,各路傳輸速率最高可達921.6 Kb/s。STl6C654電路設計如圖3所示。
2 系統軟件設計
2.1 操作系統
Vxworks是由WRS(Wind River System Ine.)公司開發的一套具有微內核、高性能、可伸縮的實時操作系統,支持廣泛的網絡通信協議,支持32位的CPU,包括Intel公司的x86、MIatorola公司的68k和PoweerPC、MIPS、ARM,并能夠根據用戶的需求進行組合;同時WRS公司還提供了優秀的實時操作系統開發工具Tornado。Tornado是一整套強有力的交叉開發工具,它能夠支持幾乎所有的工作平臺和目標處理器,所提供有工具可用于所有目標機,并具有兩種調試模式(系統模式和任務模式),能夠輕松給Vxworks操作系統添加刪除各種通信協議,能夠支持目標機和宿主機的如以太網、串行線路、在線仿真等通信選項,其機制和功能都是基于C/C++語言,任務、中斷、通信都提供了統一的API接口。這些特性為編寫應用程序和設備驅動提供了極大便利。Tornado目前已發展到6.O及更高板本。本設計開發工具是Tornado 2.0。
在Vxworks下,設備驅動可以嵌入到內核隨系統一起啟動,也可以作為加載模塊在系統啟動后運行。前一種需要修改內核,需要熟悉內核結構和運行方式,這實現比較困難:而后一種比較簡單,與編寫一般的應用程度類似。本設計采用后者。
2.2 STl6C654程序設計
定義消息結構MSG_STRUCT和串口接收UART_RECE_STRUCT數據結構:
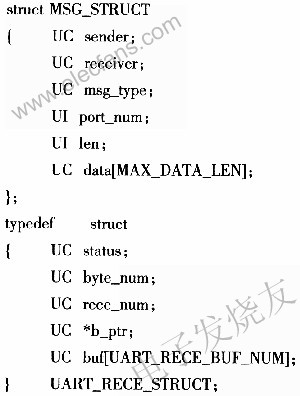
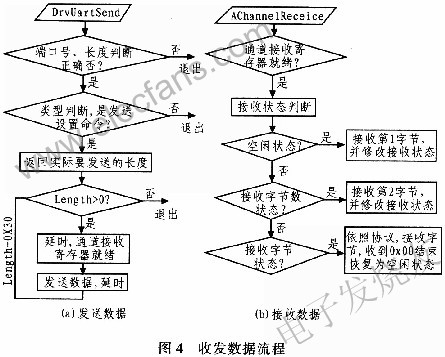
系統啟用收發2個任務,初始化STl6C654后,實現收發數據流程如圖4所示。
3 結論
在詳細分析MPC860和STl6C654元件性能參數的基礎上,介紹了具體的開發實例。硬件采用MPC860連接STl6C654,軟件采用VxWorks系統,雙任務驅動STl6C654進行串口收發通信,該實例已在TornadoⅡ2.0_2版本上通過調試,單通道連續收或發5字節實驗,1秒20次無丟失包。該
實例已成功應用于某型網絡設備開發中。