
0 引 言
艦船、潛艇以及其他水下航行器在運動中,都會由于螺旋槳的旋轉產生空化或者海面的波浪破碎以及從吃水線部分大量空氣的卷入,在艦船尾部的海水中形成一條含有大量氣泡的氣泡幕帶,即艦船尾流。尾流中的氣泡形成后會受到重力、浮力、粘滯阻力三部分合力的作用而經歷一個溶解、上升以及氣體膨脹的過程。尾流中氣泡的存在使得其透射、散射等光學特性與無擾動的靜水不同,利用上述性質的尾流光探測方法應運而生。對尾流的探測是間接探測艦船及水下航行器的一種新方法,有著廣闊的應用前景和重要的國防意義。本文設計實現了一種利用激光照射尾流氣泡,通過測量氣泡后向散射光空間頻譜分布來探測尾流氣泡的艦船尾流實時探測系統。
1 系統工作原理及硬件組成
1.1 系統工作原理
尾流光探測方法通常采用直接測量尾流氣泡后向散射光功率強度。通過分析,這種方法容易受到背景干擾。本文采用一種新的測量方法,給尾流氣泡后向散射光接收系統前加一個傅里葉變換透鏡,可以得到散射光的空間頻譜分布,由于散射光的頻譜強度服從圓對稱的高斯分布,所以只要選取通過圓心的任意一個方向散射光的角譜強度即可表征該高斯分布的所有特征。實驗證明,探測氣泡的散射光空間頻譜分布是一種非常有效的尾流探測方法,并且可以抑止背景干擾。這里采用線陣CCD作為光電轉換器件,可編程控制芯片(CPLD)作為時序產生單元,DSP芯片作為高速數字信號處理及控制單元,AD9200作為模數轉換單元,USB接口作為系統輸出上傳單元,構成氣泡光散射特性實時探測處理系統。系統工作原理如圖1所示。整個系統按照模塊化設計方法來設計,使系統的整體結構更加完善和清晰,系統性能得以提高,為調試、維修帶來方便。
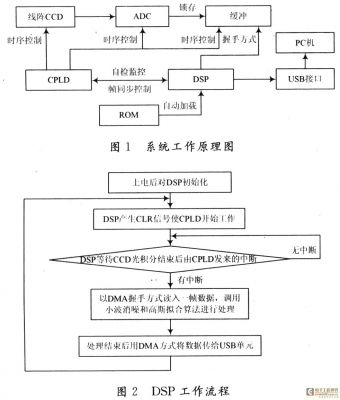
在系統中,為了保證時序的匹配,各部分均運行在一個統一的基本時鐘下,由一個外接晶振
40 MHz作為整個系統統一的輸入時鐘送人CPLD,經CPLD產生CCD的各路驅動時鐘信號、
ADC驅動信號、USB和DSP的時鐘信號以及CPLD和DSP通信的信號。
A/D的工作頻率和CCD的輸出頻率嚴格同步以確保不丟失有用的數據。
CCD輸出的模擬信號經過A/D轉換器轉換成數字信號送入系統的處理單元DSP進行處理。
DSP進行信號處理后以12位的分辨率把數字形式的氣泡散射空間頻譜的峰值和半高寬度值送給USB單元,
通過USB接口實時上傳至電腦處理并存儲。系統DSP數據處理部分的工作流程如圖2所示。
1.2 硬件設計
CPLD選用可編程邏輯器件MAX7128SLC-84,DSP選用ADI公司的ADSP21062。MAX7128SLC-84可以將I/O設置在3.3 V或5 V下工作。因為系統中DSP,AD9200的工作電壓均為3.3 V,故CPLD的I/O也設置為3.3 V。然而CCD工作電壓為5 V,需要的外部驅動時序脈沖也都為5 V電平模式,而MAX7128SLC-84輸出的脈沖信號都為3.3 V,電平不匹配,這里采用ADG3308芯片對MAX7128SLC-84輸出的CCD驅動信號作電平轉換,使它們從3.3 V變為5 V。MAX7128SLC-84與系統DSP,74AHC574,CCD之間的同步控制如圖3所示。
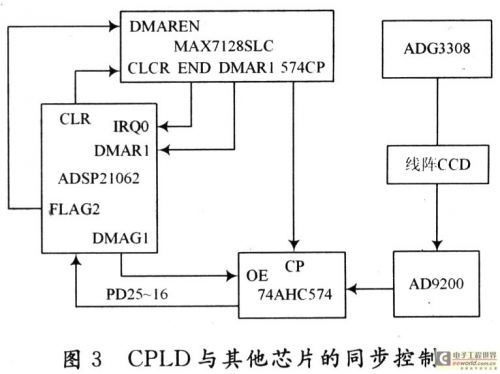
END信號每11 ms產生一個負脈沖作為DSP的外部中斷請求信號,低電平有效。CLR信號由DSP產生,作為清零信號,當CLR為低時,則不產生CCD與AD9200的驅動時鐘。PCLK是DSP的時鐘,與CPLD的輸入時鐘信號同頻,這里PCLK由CPLD產生而不是直接由晶振送入DSP是為了保證整個電路系統在統一的時鐘下工作。ADSP21062與74AHC574之間采用DMA握手方式讀取數據。74AHC574的CP與OE必須嚴格進行設置,否則采樣數值將有時候發生紊亂。74AHC574的CP信號由CPLD產生,CP滯后DATACLK,在數據有效期內CP上升沿將數據鎖存至74AHC574。DMAR1信號由CPLD產生,ADSP21062響應該外部中斷請求DMAR1后輸出DMAG1信號作為74AHC574的輸出使能信號OE,從而以握手方式將數據送到ADSP21062的外部總線上。DSP用FLAG2產生DMAREN以控制DMAR1請求,方便ADSP2106在做數據處理時關斷外部中斷,防止由其產生的更改內部RAM數據的誤操作。
1.3 軟件設計
由理論研究的結論可知,散射光空間譜強度服從圓對稱的高斯分布,因此,為了得到氣泡光散射譜強度分布的峰值和線寬參數,必須對測量數據進行高斯擬合。然而,由于高斯擬合算法無法克服光強飽和的影響,擬合曲線的形狀跟真實的譜強度的實際分布往往誤差較大,這會影響整個系統的探測精度、作用距離。進一步分析可知,由于信號測量數值起伏不定,還存在一些嚴重偏離實際數值的雜散點,這些是由CCD器件的噪聲引起的,它們也嚴重影響了高斯擬合算法的效果。小波消噪技術使得信號測量數據值起伏變小,且消除了大部分的孤值點,從而使高斯擬合算法更有效,擬合結果也更逼近實際的譜強度分布。CCD每10.6 ms輸出一幀數據,一幀的信號輸出大約10 000個,為了提高程序執行效率和運算速度,把經過小波消噪之后的數據再進行壓縮,抽取其中500個數據點做高斯擬合處理。通過高斯擬合算法求出散射角譜高斯擬合曲線的峰值、峰值位置以及半高寬度。最后將求得的半高寬度和峰值輸出到后續USB接口部分。
2 結 語
本文設計的艦船尾流探測系統,以尾流后向散射光空間頻譜強度的半高寬度和峰值來判斷水中是否存在尾流。這種測量方法能夠有效抑止背景干擾,有一定的先進性。目前水下航行器的速度為30~70海里/h(1海里=1.852 km),探測系統輸出的數據周期為11 ms,假設水下航行器的速度為70海里/h,那么,探測系統每0.396 m采集一次數據,其精度是比較高的。實驗結果表明,該探測系統體積小、穩定性好、可靠性高、處理速度快、探測結果準確。