
1集中供電方式通信電源系統
為了保證穩定、可靠、安全供電,通信電源系統可采用集中供電、分散供電、混合供電或一體化供電方式。其中集中供電方式通信電源系統的組成框圖如圖1所示。
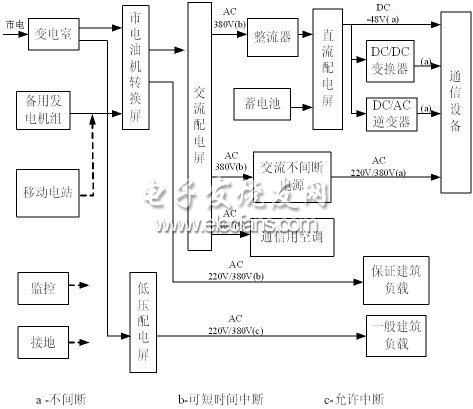
圖1集中供電通信電源系統示意圖
目前,國內外通信電源仍然大都采用模擬和數字相結合的控制方式,大量應用數字化技術的還主要是保護和監控電路以及與系統的通信,完成電源的起動、輸入與輸出的過、欠壓保護,輸出的過流與短路保護及過熱保護等,通過特定的界面電路,也能完成與系統間的通信與顯示,但PWM部分仍然采用專門的模擬芯片。如中興和華為目前還是采用傳統的模擬技術,艾默生已有部分產品采用了全數字的控制,但其EMC、環路穩定性等問題還有待于改善。
本文針對通信電源的特點及現狀,采用倍流整流的移相全橋變換器作為主電路,進行了關鍵參數的計算,并設計出樣機進行分析仿真結果。
2改進型倍流整流移相全橋變換器關鍵參數設計
倍流整流主電路結構如所圖2示。該電路由全橋逆變和倍流整流電路組成,根據負載大小的不同,該電路可工作在斷續和連續模式,在斷續狀態下,副邊二極管自然換流,沒有反向恢復引起的電壓尖峰,也沒有占空比丟失的情況發生,但占空比較小,效率較低。
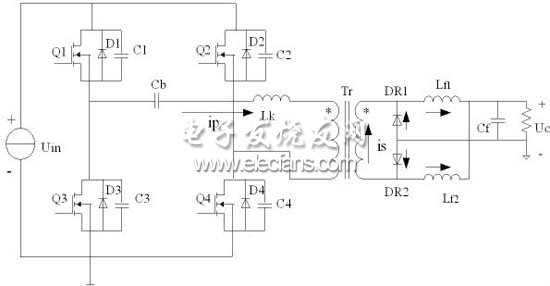
圖2倍流整流主電路
在連續模式下(如圖3所示),要從實現副邊整流二極管的自然換流以及實現滯后管ZVS兩個方面著手。而實現這兩點的關鍵在于阻斷電容和輸出濾波電感的優化設計。
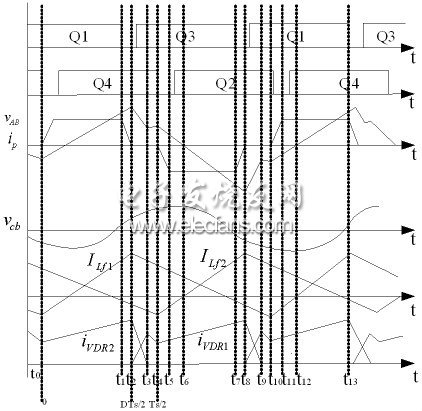
圖3電路連續模式波形圖
下面對這兩個元件的選擇作出分析。
2.1阻斷電容設計
阻斷電容上的電壓使得原邊電流在零電平時快速下降,所以副邊整流二極管在副邊電壓為零階段能換流結束,從而避免了二極管的反向恢復問題,并且二極管換流結束后,由于二極管的自然阻斷能力,電感上的電流反向后可以流經副邊,從而折射回原邊給滯后管提供能量實現ZVS。從這個意義上來說,阻斷電容越小越好。但是,在中的t6時刻,變壓器原邊繞組上的電壓最大,即Vpmax=-(Vin-Vcbp),Vcbp是阻斷電容上的最大電壓,副邊整流二極管上的電壓應力為:
所以阻斷電容越小,其上的電壓也會越高,從而增大了副邊整流二極管的電壓應力。
從這個意義上來說,阻斷電容不宜過小。所以,阻斷電容的選取,是在可以保證二極管自然換流的前提下,越大越好。
從圖3中可以看到,二極管t3在時刻換流結束。最壞的情況是,在電壓開始建立的時候,二極管剛好換流結束,也即t3=t4時。此時,ip減小到最小值:
而在t2時刻:
在t2~t3時間段內,原邊電容和漏感諧振,阻斷電容的電壓、原邊電流為:
所以二極管能夠自然換流的條件是:

上式推出了二極管在t4時刻完成換流的條件,它與阻斷電容上的電壓Vcb有關。
在t0~t2時間段內:

其中,k為原副邊匝比。I10、I20分別為iLf1、iLf2在t0時刻的值。
由式(2),有I10=ILfmax,可以得出ip在[t0~t2]時間段內的表達式:

可以得出,在t2時刻,電容上的電壓:

而從式(1)可得:

從上面分析可以推導出:
實際設計中,可以通過該式確定阻斷電容Cb的值。
2.2濾波電感設計
濾波電感有兩個作用。一是濾波作用,減小輸出紋波,從這個意義上說,電感值越大越好。二是為原邊開關管的ZVS提供能量,電感電流必須可以減小到零且有一定的負值,從這方面來說,電感必須小于一定值。所以設計電感的原則是,在滿載能夠實現滯后管軟開關的前提下,電感取最大值。
3基于Buck變換器的小信號模型設計
Buck變換器只有兩種工作模態,即開關管導通和開關管截止狀態。
首先為理想的Buck變換器在一個開關周期內的兩種不同工作狀態建立狀態方程和輸出方程。這里取電感電流iL(t)和電容電壓uc(t)作為狀態變量,組成二維狀態向量x(t)=[iL(t),uc(t)]T;取輸入電壓ui(t)為輸入變量,組成一維輸入向量u(t)=[ui(t)];取電壓源的輸出電流is(t),變換器的輸出電壓u0(t)作為輸出變量,組成二維輸出向量y(t)=[is(t),u0(t)]T。
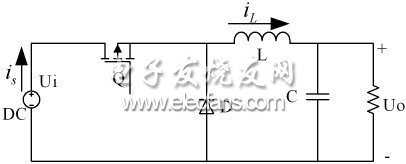
圖4Buck變換器拓撲圖
4基于倍流整流移相全橋變換器的小信號模型設計
倍流整流移相全橋變換器是在BUCK變換器的基礎上推導出來的,兩種變換器都是典型的二階系統。由它的狀態空間矩陣得到控制輸出的傳遞函數為:
代入相關參數可得到該傳遞函數的波特圖如圖5所示:
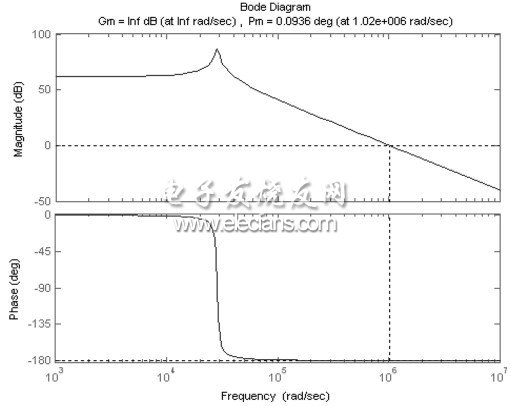
圖5倍流整流移相全橋變換器傳遞函數波特圖
5通信電源的實驗研究
基于以上分析,本文設計了一個輸出電壓和輸出電流分別為48V和15A通信電源的樣機,主電路由橋式逆變電路、高頻變壓器及阻斷電容、輸出整流濾波電路等組成。外圍電路包括采樣電路、驅動電路、過流保護電路等的設計。
5.1采樣電路設計
輸入電壓和輸出電壓采用線性光耦HCNR201采樣,如圖6所示。輸出電流和輸入電流采樣采用電流LEM,該方法精確可靠,實現了電隔離,但成本較高,且需要精確的±15V直流電源。

圖6電壓采樣電路
5.2驅動電路設計
MOS型器件的理想驅動波形應有合理的脈沖上升沿和下降沿、足夠大的驅動功率、合適的驅動正向電壓和反向電壓。本電源移相全橋拓撲的四路驅動信號占空比大小固定;開關頻率較高,為100K,要求有較強的抗干擾能力。
5.3過流保護電路設計
電壓型電流傳感器(霍爾器件)檢測到輸出電流,經過RC電路濾波后送到比較器的正相輸入端,而設定的電壓給定值接比較器的反向輸入端,兩個量進行比較,當大于給定值時,說明輸出過流,此時比較器輸出高電平,三極管導通,發光二極管發光提示過流,同時PDPINTA為低電平,然后接入到DSP。GPIOA5送出的是保護信號,當軟件出現保護時,GPIOA5為高電平,其相應的比較器輸出為高電平,同樣使得PDPINTA為低電平。
5.4軟件設計
軟件設計包括主程序、通信子程序、雙環調節子程序、A/D轉換中斷、PWM1和PWM3產生中斷、PWM2和PWM4產生中斷。
5.5實驗方法和結果分析
實驗結果表明:采用積分分離的控制算法,超調量減小,調節時間減小,從而改善了動態性能。倍流整流電路較全波整流來說,占空比丟失小、沒有二極管的反向恢復以及滯后管實現軟開關更容易。