
隨著電子技術的發展,電子對抗在武器系統中扮演著重要角色,電子對抗體系向多樣化發展,諸如利用電子干擾設備直接干擾對方電子系統正常工作的電子對抗方法;利用武器彈藥系統攻擊對方電子設備。無論采用哪種方法贏得戰場主動,其前提條件是要知道對方通訊設備、無線電通信以及其他發射無線電信號的電子設備的方位。此外,為了實施對多源(如多發引信、多臺通信機或干擾機)的干擾,需有效利用我方干擾機的功率資源,確定發射源的方位,可采用轉動接收天線的角度確定發射源方位。但這種方法存在測角精度和測量速度的矛盾,難以滿足空間存在多個運動目標時,確定各目標方位的要求。而空間譜估計測向技術可實現對空域中多個目標的同時超分辨測向,因此,這里給出空間譜估計測向系統設計方案。
2 空間譜估計測向原理
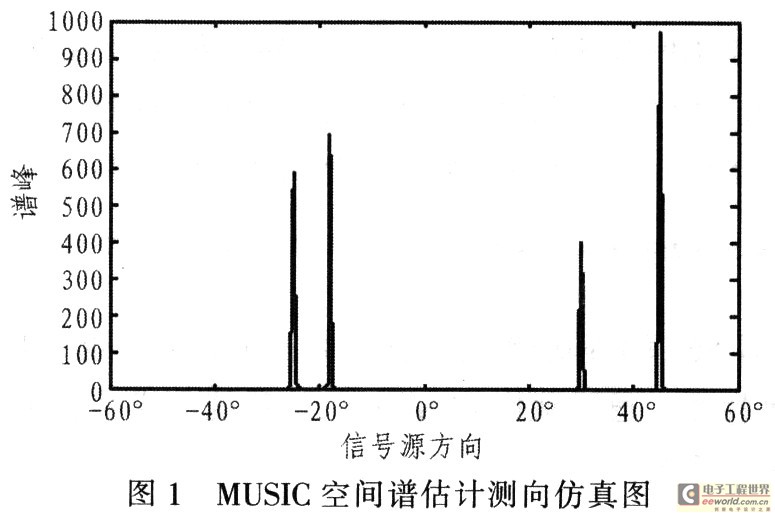
空間譜估計測向是一種以天線陣輸出信號的空間相關特性為基礎的超分辨譜估計方法。MUSIC算法是基于特征結構分析的空間譜估計方法,其測向原理引是根據矩陣特征分解理論,對陣列輸出協方差矩陣進行特征分解,將信號空間分解為噪聲子空間ENH和信號子空間EHS,利用噪聲子空間ENH與陣列的方向矩陣的列矢量正交的性質,構造空間譜函數P(θ)并進行譜峰搜索,從而估計出波達方向信息。圖1給出采用MUSIC算法進行空間譜估計技術仿真測得的信號源方向消息,其信號源方向分別為45°,30°,一18°,25°。根據圖1 MUSIC算法仿真結果可以看出,該算法可精確確定信號源方向信息。
3 空間譜估計測向系統設計
實現空間譜估計測向系統要具備物理支持(天線陣列和數字接收機)和軟件系統支持。這兩者是相輔相成的,其硬件的高性能、一致性使采樣數據誤差減小,從而充分表現譜估計軟件的超分辨性能;譜估計算法的高速、高穩定性降低了硬件成本要求。
3.1 空間譜估計測向系統構成
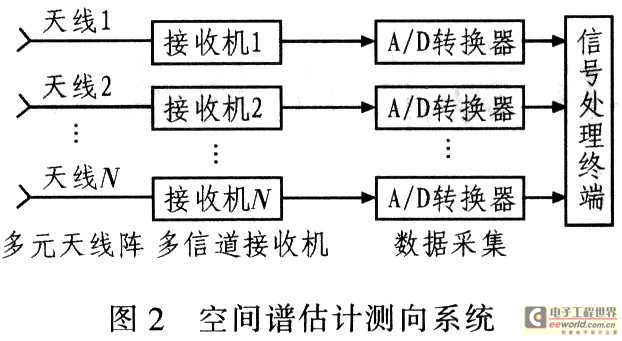
空間譜估計測向系統的基本構成框圖如圖2所示。由圖可見,該測向系統由多元天線陣,多信道接收機,轉換器和信號處理終端構成。要想使空間譜估計算法的優良性能在測向中得到很好體現,就需解決好相應組成部分的技術問題。
3.1.1 多元天線陣
多元天線陣是對空間信號采集的傳感器,各天線陣元接收到的信號幅度、相位與信號間的關系,以及信號到達方向有關。從原理上說,天線陣可以布置成任意形式,各天線陣元的特性也都不相同。在空間譜估計測向中,將具有相同特性的各陣元設為全向天線陣元,各陣元均勻等距地分布在一直線上,陣元間隔一般取為二分之一工作波長,這種陣通常稱為均勻線陣。多元天線陣的各個陣元,要求機械定位精度高,各陣元的方向圖要盡可能的保持一致,各陣元之間的互耦也要盡量小。
3.1.2 多信道接收機
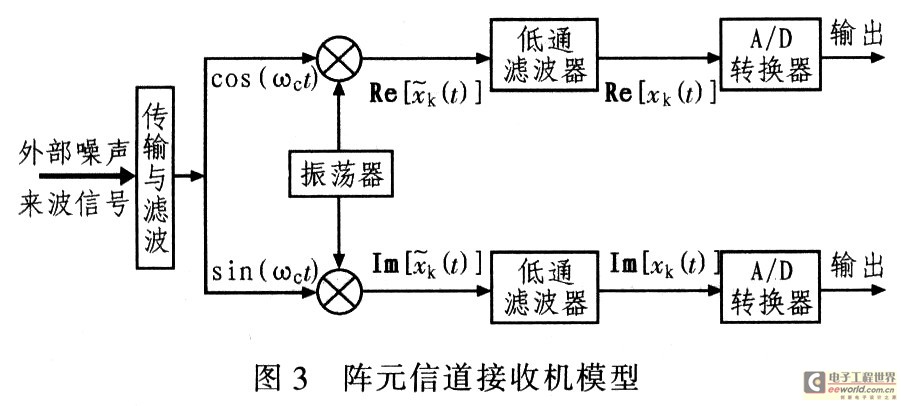
每一天線陣元的輸出送至各自的接收機輸入端。如N個天線陣元,就有N個完全相同的接收機。接收機將信號放大、變頻到適合A/D轉換的頻率,從而輸出中頻信號。也可將A/D轉換器和接收機集成一體,直接輸出數字信號。為了完整保存各天線陣元接收的信號幅度和相位信息,一般采用I、Q通道方法,即在中放末級采用正交混頻,將相位相差90°兩路本振信號送到兩個混頻器,其輸出的低通信號即為I和Q通道信號。I和Q通道各接一A/D轉換器,其輸出就是數字化的復信號的實部和虛部。各個陣元的接收機模型如圖3所示。
在通信偵察測向中,該接收機可采用多次變頻的外差式接收機,雷達偵察測向時則是寬帶微波數字式接收機。空間譜估計算法對各個通道的一致性要求較高,雖然可通過加校正源改善通道的一致性,但是在實際應用中還要求多信道接收機的各個通道盡可能保證一致性良好。
3.1.3 MD轉換器
每一路接收機的輸出需經A/D轉換變成數字信號。A/D轉換器位數的選擇應考慮信號的動態范圍、量化噪聲、對測向性能的影響,以及價格等因素.一般應不低于8位。
除采用I、O通道保存信號幅度和相位信息外,也可采用數字正交通道。這時每路接收機的輸出只需一個A/D轉換器,不過采樣頻率應超過2倍信號帶寬(常采用4倍信號帶寬的采樣頻率),再用數字方法形成信號的實部和虛部(數字式希爾伯特濾波器)。數據接收部分要求轉換器的采樣精度高,有效字長多,單位時間內的采樣次數多。這樣有利于捕獲空間中出現的突發的、短暫的信號。
3.1.4 數字信號處理終端
多路接收機經A/D轉換后輸出的數字信號同時送至數字信號終端進行處理,以實現對空間信號的數目、信號到達方向以及信號其他參數的估計。空間譜估計測向方法的優異性能主要通過優良的測向算法及其在信號處理終端上的實現。與幅度和相位比較等測向方法不同,空間譜估計測向方法需經較為復雜的計算才能得到待測信號的到達方向,因此性能優異的高效測向算法和高速數字信號處理終端就成為這種測向技術的核心。從原理上考慮,一臺通用微機可用于信號處理終端。當要求測向過程實時或準時時,則應采用高速數字信號處理器完成信號處理終端的任務。
3.2 空間譜估計算法的硬件實現方案
現代數字信號處理方案多采用FPGA和通用DSP的混合設計,即DSP+FPGA的設計方案。用FPGA設計協處理器處理大量、規則的計算,而利用DSP的靈活性處理復雜不規則的計算,從而使整個系統性能達到最優。
對空間譜估計測向中的MUSIC算法分析可知,MUSIC算法可分為:求解協方差矩陣,對協方差矩陣特征分解和譜峰搜索。其中,求解協方差矩陣是一種包含大量而又規則計算的算法,且運算的數據直接從接收機的A/D轉換器輸出得到,可采用定點計算方式,適合采用FPGA實現。FPGA具有可編程和現場配置的特點,利用與器件相應的CAD軟件,實現用戶規定的各種特定功能,具有較高的靈活性。設計者可將其視為一個由若干與非門構成的陣列,各與非門之間通過一定的方式相連接,實現特定功能。
實現協方差矩陣的特征分解可采用雅可比算法。該算法中。數據的動態范圍很大,用定點計算會發生溢出,并且也無法滿足精度要求,所以只能采用浮點計算;雅可比算法除包含大量的乘法、加法外,還有開方、除法等不太規則的計算。因此,用于實現特征分解的雅可比算法不宜采用FPGA實現,而應采用DSP實現。DSP類似于通用微處理器CPU,但又有其針對數字信號處理的特點。其與通用微處理器不同之處在于:采用哈佛結構,程序和數據分開存儲;采用一系列措施保證數字信號的處理速度,如對FFT的專門優化。因此DSP數字信號處理能力大大優于通用微處理器,同時還具有通用微處理器系統靈活度高,計算可編程控制的特點,可適用于各種復雜的信號處理。
因此,MUSIC算法的硬件實現可采用DSP+FPGA來實現,即定點計算和浮點計算混合的方案。FPGA實現求解協方差矩陣,可采用定點計算方法,然后把得出的數據送入DSP,將其定點轉換為浮點,用浮點計算方式計算特征分解和譜峰搜索。
求解協方差矩陣時有串行和并行兩種方案。串行方案主要是以節省資源為優先考慮的一種方案,可用于那些對實時性要求不太嚴格的應用中;并行解決方案主要是以處理速度為優先考慮的一種方案,可用于那些對實時性要求較高的應用中。圖4給出并行處理方案的原理框圖。
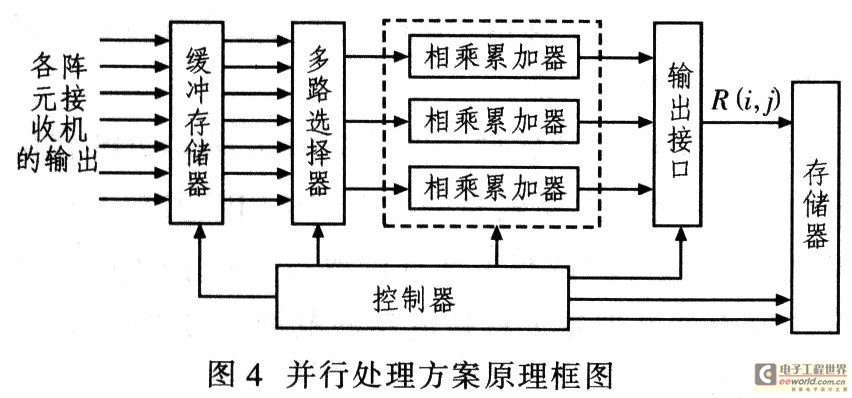
并行方案與串行方案的區別在于:并行方案使用多個并行相乘累加器進行計算。這樣可有效提高整個系統的處理速度。并行處理的方案應當做到使各處理器的負載平衡,對于含8個陣元的測向系統,需要求出36個元素的值,因此可選用2,3,4,6,12,18,36個相乘累加器的不同的并行處理方案。顯然相乘累加器越多,處理速度越快,但其成本也高。
4 結論
在空間譜估計測向系統構成、工作原理、某些關鍵技術及硬件實現的基礎上,介紹基于相關矩陣特征分解的MUSIC算法原理及其硬件實現方案。空間譜估計技術對雷達信號偵察測向的前景良好,具有研究價值。