
1 引言
在信息科學中,數據采集技術已經成為其重要的一個研究問題,它已經與計算機技術、網絡技術、傳感器技術、信號處理技術共同構成了現代檢測技術的基礎,隨著科學技術的發展和數據采集系統的廣泛應用,人們對數據采集的主要技術指標,如采樣速率、分辨率、精度、輸入電壓范圍、控制方式以及抗干擾能力等方面,都提出了越來越高的要求,尤其是采樣速率,更是數據采集系統設計者和使用者最關心的一項重要指標。在電力系統自動化領域,實時數據采集是至關重要的環節,它直接影響整個自動化裝置的性能。因此,提高采集速度和精度一直是電力系統軟件開發人員要解決的難題。
2 系統結構
本文介紹的phcteeq-1型電力諧波綜合治理實驗裝置的實時數據采集系統結構示意如圖1所示。
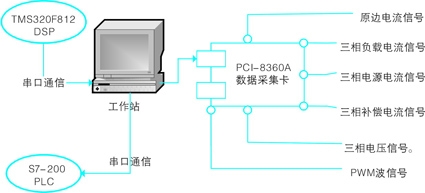
圖1 采集系統結構示意圖
裝置采用電力諧波有源濾波和無源濾波的先進理論和技術,以igbt-ipm智能模塊、dsp、工控機等核心部件為硬件基礎,進行電力諧波綜合治理技術實驗,實時性好,實驗效果明顯。裝置采用公共基礎臺+功能掛件的設計方式,結構緊湊,集成度高,擴展性好,能夠完成單相/三相電力諧波的產生、在線檢測、分析、有源濾波和無源濾波等多項實驗。
2.1 數據采集卡
在該裝置中,模擬信號的采集主要通過數據采集卡,在這個裝置中采用的pci8360a數據采集卡:它具有32個模擬量輸入通道:ad0-ad31;輸入信號范圍:0~10v,-5v~+5v,0~20ma (0~10v為出廠默認設置)。輸入精度為12位。單通道最大采樣頻率:500khz,多通道最大采樣頻率為200khz。啟動轉換方式為軟件啟動/外觸發(定時)啟動。這里將模擬量輸入單雙端選擇跳線jp2設置為單端輸入,模擬量輸入范圍選擇跳線jp1,jp3設置為雙極性。
在這個實驗裝置中需要采集的模擬信號有十四路:三相負載電流信號,三相補償電流信號,三相電源電流信號,pwm波信號,變壓器原邊電流信號,三相電壓信號。采用dhpt、dhct高精度微型傳感器來完成數據采集的功能,采集到的數據經處理后傳輸到數據采集卡與dsp中。傳輸到數據采集卡的信號,一方面,實時動態顯示原始信號,另一方面,經fft分析和基于單個人工神經元的自適應電力諧波檢測方法分析后顯示各次諧波權值。
2.2 dsp部分
dsp采用tms320f2812,tms320x28xx信號處理器集成了事件管理器(281x處理器),epwm, ecap, a/d轉換模塊,spi外設接口,sci通信接口,ecan總線通信模塊,看門狗,通用目的數字量io,pll時鐘模塊,多通道緩沖串口,外部中斷接口,存儲器及其接口,內部集成電路(i2c)等多種外設單元,使用戶能夠以很便宜的價格開發高性能數字控制系統。傳輸給dsp的各種信號經fft算法分析,將各次諧波權值發送給工控機。dsp與上位機采用232串口通信。數據幀的格式如下:
a相:aaaa 1次諧波權值 3次諧波權值 5次諧波權值 … 25次諧波權值 aaaa
b相:bbbb 1次諧波權值 3次諧波權值 5次諧波權值 … 25次諧波權值 bbbb
c相:cccc 1次諧波權值 3次諧波權值 5次諧波權值 … 25次諧波權值 cccc
當用戶選中了查看經dsp分析的某相信號時(單選),上位軟件發送相應需求信號給dsp,例如:上位機發送aaaa,dsp接收到該信號后,首先發送兩個字節的幀頭aaaa響應上位機,上位機判斷回傳的數據是否為aaaa,是,則接收并顯示,否,則不予理采。每次諧波權值采用32位表示,按照ieee 754 標準:
(1) 第1位為符號位,1 代表負,0代表正;
(2) 接下來用8位來表示指數部分;
(3) 接下來的23位用來表示有效數位。
幀尾為aaaa,表示一幀數據發送完畢。
2.3 plc部分
plc采用s7-200,主要完成掛件識別功能。將各變量狀態通過opc技術與上位機軟件通信。上位機軟件組態顯示電路狀態,可以直觀查看電路當前狀態。
3 上位機軟件
3.1 軟件開發方式
軟件采用delphi 7.0完全面向對象的可視化平臺開發,它是borland公司最優秀的windows開發工具之一,它的可視化開發環境和面向對象的快速應用程序開發(rad)工具,使程序開發人員能在windows平臺上快速開發出32位的windows應用程序。它采用面向對象的程序設計語言object pascal。下面對上位機軟件中的關鍵技術加以說明。
在pci8360a的使用中有三種可行的軟件開發方式:
(1) 使用廠家提供的開發軟件。廠家提供的軟件只能作為測試采集卡是否正常的工具。
(2) 自己動手編制程序完成底層的數集和指令的輸出。此方法工作量大。
(3) 利用開發商所提供的windows標準動聯接庫文件。使用動態鏈接庫有如下優點:
l應用程序編譯鏈接后的可執行文件較小;
l應用程序所需用到的內存較小;
l對應用程某一模塊的修改,更換不會影響到其它模塊。本系統的開發此種方式。動態鏈接庫主要有兩種調用方法:靜態調用和動態調用。
動態鏈接庫的靜態調用是最簡單的調用方法。它主要使用external指令來聲明外部的函數或過程。為了方便使用和維護動態鏈接庫,可以將工程中所用到的所有不同動態鏈接庫中的函數統一定義在一個單元中,并且還可以在該單元中定義調用庫中函數或過程時所使用的常量或數據類型。
動態鏈接庫的動態調用主要是使用windows api函數進行相應的操作,比靜態調用復雜的多。因此,這里采用動態鏈接庫的靜態調用的方向。
3.2 連續ad采集的編程思路
(1)首先在程序初始化時調用 zt8360a_opendevice函數,用于打開設備,只調一次即可。
(2) 調用 zt8360a_disablead 函數,禁止ad;調用zt8360a_clearhfifo函數,清硬件緩沖區(hfifo);調用 zt8360a_clearsfifo 函數,清軟件緩沖區(sfifo);調用zt8360a_aiinit 函數,做一些ad初始化工作;調用 zt8360a_openirq函數,打開hfifo半滿中斷。
(3)在一個循環中不斷調用zt8360a_getsfifodata count判斷sfifo中數據的個數,申請一個數組,并把這個數組中傳入 zt8360a_ aisfifo 用于接收數據,把讀出的數據保存到文件或直接顯示。注意:sfifo的默認大小為 819200,用戶要不斷讀數,使sfifo有空間放入新的來自hfifo的數,如果sfifo中的有效數據的個數接近819200,會使整個ad過程停止。如果想重新采集,必須重復2—3步。
(4) 調用 zt8360a_closeirq函數,停止采集過程。
(5) 在程序退出前調用 zt8360a_closedevice函數。
3.3 pci8360a數據采集卡數據采集部分代碼
if(zt8360a_opendevice(m_cardno) <> 0) then
//初始化數據采集卡,返回0表示打開設備成功,m_cardno為1
begin
showmessage(`打開設備失敗`);
exit;
end
else
begin
i:=zt8360a_getcardstatus(1); //采集卡狀態
if i<>0 then
begin
i:=zt8360a_getlasterr(); //得到當前錯誤號,為0表示無錯誤
showmessage(`錯誤號為:`+inttostr(i));
end;
getmem(data,sizeof(tsomearray)*8092); //讀數據
zt8360a_disablead(m_cardno); //禁止ad
i:=zt8360a_getcardstatus(1);
if i<>0 then
showmessage(`禁止ad失敗,錯誤號為:`+inttostr(i));
zt8360a_clearhfifo(m_cardno); //清硬件緩沖區
i:=zt8360a_getcardstatus(1);
if i<>0 then
i:=zt8360a_getlasterr();
showmessage(`清硬件緩沖區失敗,錯誤號為:`+inttostr(i));
//showmessage(`hfifo`);
zt8360a_clearsfifo(m_cardno); //清驅動緩沖區
i:=zt8360a_getcardstatus(1);
if i<>0 then
i:=zt8360a_getlasterr();
showmessage(`清驅動緩沖區失敗,錯誤號為:`+inttostr(i));
zt8360a_aiinit(m_cardno, 0, 1, 0, 0, 1, 625 ,1, 0, 0);
//設置ad方式控制寄存器
i:=zt8360a_getcardstatus(1);
if i<>0 then
// i:=zt8360a_getlasterr();
i:=zt8360a_getlasterr();
showmessage(`intit`+inttostr(i));
zt8360a_openirq( m_cardno, 0, 0, 0, 0); //打開8360a中斷
i:=zt8360a_getcardstatus(1);
if i<>0 then
i:=zt8360a_getlasterr();
showmessage(`打開中斷失敗,錯誤號為:`+inttostr(i));
end;
end;
3.4 基于單個人工神經元的自適應電力諧波檢測方法
基于單個人工神經元的自適應電力諧波檢測原理如圖2所示,該方法能夠對奇次、偶次、特定次、總諧波以及相位進行實時準確的動態檢測。假設實際系統中需要檢測的最高次諧波是n次。
(1) 檢測總諧波電流:只取sinωt和cosωt作為參考輸入。人工神經元學習完成之后,系統的輸出z(t)即為總諧波電流。
(2) 檢測奇次諧波電流:取sinωt、cosωt以及sin(2k+1)ωt、cos(2k+1)
(3) ≤2k+1≤n,k為正整數) 等作為參考輸入。人工神經元學習完成之后
i2k+1(t) = w(2k+1)s·sin(2k+1)ωt + w(2k+1)c·cos(2k+1)ωt (1)
就是對應的奇次諧波電流的值。
(4) 檢測偶次諧波電流:取sinωt、cosωt以及sin2kωt、cos2kωt(2≤2k≤n,k為正整數)等作為參考輸入。人工神經元學習完成之后
i2k(t) = w2ks·sin2kωt + w2kc·cos2kωt (2)
就是對應的偶次諧波電流的值。
(5) 檢測特定次諧波和相位:取sinωt、cosωt以及sinkωt、coskωt(k∈[2,n]且為正整數)等作為參考輸入。人工神經元學習完成之后
ik(t) = wks·sinkωt + wkc·coskωt (3)
就是對應的k次諧波的值;wkc/wks就是k次諧波相角的正切值。
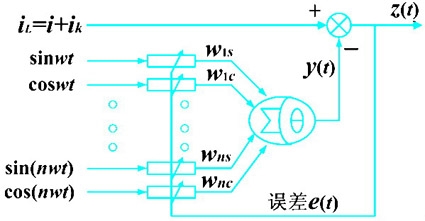
圖2 基于單個神經元的電力諧波檢測原理圖
3.5 iplot控件的應用
iplot控件是非常優秀的控件,能夠直觀實時顯示工業現場中的模擬信號。它功能強大,即使在劃分數據時也可以縮放,滾動。x軸,y軸和頻道數均無限制。對于不同通道信號采用顏色區分,并用文字標注,方便觀察比較分析。能以.bmp,.emf,.jpg各種圖形格式保存信號曲線,也可以打印輸出。現以其中一路通道信號的顯示加以說明。
var
currcount:integer;
retcount:integer;
i:integer;
begin
//設置iocomp中iplt控件的參數
iplot.channel[0].titletext:= `u相電壓信號`; //設置通道標題文字
iplt1.xaxis[0].min:=0; //設置u相電壓信號x軸的起始坐標值
iplt1.xaxis[0].span:=2560; //設置x軸的坐標域
iplt1.yaxis[0].min:=-5000; //y軸表示u相電壓信號的幅值
iplt1.yaxis[0].span:=10000;
i:=zt8360a_getlasterr();
if i<>0 then
showmessage(`錯誤號為:`+inttostr(i));
currcount := zt8360a_getsfifodatacount(m_cardno);
//得到驅動緩沖區(sfifo)中當前有效數據的個數
if currcount > 0 then
begin
retcount := zt8360a_aisfifo(m_cardno, data, 8192);
//定時啟動ad或外觸發啟動ad時,從驅動緩沖區中讀8192個數到緩沖區
for i:=0 to retcount do
begin
iplt1.channel[0].addxy(x,data^[i]); //圖形顯示
x:=x+1;
end;
end;
end;
3.6 線程的應用和防止數據覆蓋
windows提供的多媒體定時器,它的最小時間精度只能達到1ms。不能滿足實時數據采集的要求。在本項目中,采集的電壓信號頻率為50hz,每個周期為0.02秒。根據項目要求,每個周期需采樣256個點,即每0.02/256=0.000078125秒讀一次。因此需要使用線程。另外,pci8360a的單通道采樣頻率最高可達500khz,即每1/500000=0.000002秒采樣一次。因此,可能出現數據覆蓋,即還沒有處理的數據被新讀入的數據覆蓋。為防止這種情況發生,需要創建緩存區。
4 結束語
在該項目的上位機軟件開發過程中,數據采集是其它工作的前提。在數據采集中掌握pci8360a數據采集卡的的使用是非常重要的,它有效的利用了工機控機高速處理能力。在使用過程中要注意:未接信號的通道一定要接模擬地;為防止引入現場干擾,不應該使信號引腳懸空,可以將不使用的信號引腳與模擬地短路;各選擇跳線均選出廠設置。iocomp圖形控件的使用使得實驗的上位機界面更加美觀。iplot控件顯示各路信號波形。ispectrumdisplay,ipiechart控件用于顯示各次諧波含有率,iangularloggauge控件用于顯示基波功率。為提高讀數據的速率,使用了線程。動態鏈接庫和防覆蓋技術的應用,使得系統更為可靠。多種采集方式同時應用,便于比較多種方法各自的優缺點。