
隨著汽車行業的發展,車禍也在頻繁發生,根據公安部交通管理局發布的2009年全國道路交通事故情況顯示,2009年,全國共發生道路交通事故238 351起,造成67 759人死亡、275125人受傷,直接財產損失9.1億元。所以,在我國減少交通事故、挽救人身財產安全已是迫在眉睫。
我國衛生部提供的一份資料表明:在1000例交通事故傷害者中。只有14.3%是乘救護車到達醫院。另外,在我國車禍死亡者中只有大約40%是當場死亡,60%的人死于醫院或者送往醫院途中,其中約30%的受傷者因為搶救不及時而死亡。因此。如果能減少搶救時間,及時得到救助,將能在很大程度上減少傷亡。而很多時候車上人員在發生車禍時不知道自己具體的位置,或者是已失去的報警能力無法及時與救援部門聯系,耽誤了最佳的救援時間,從而導致傷害的增大。
基于加速度的車禍報警系統即當發生車禍之后,該系統能能立即讓監控中心獲得車禍信息,并指引救援人員到達事故現場,及時展開救援工作,以達到盡量減少事故人員傷亡的目的。事實證明,國外將電子技術、無線電通訊技術應用于交通事故的自動呼救,可有效減少事故人員傷亡。
1 技術介紹
1.1 GPS定位
GPS系統由環繞地球運行的GPS衛星組成,使得地面任一點都能觀測到4顆以上的衛星,GPS信號接收機能夠捕獲到按一定衛星截止角所選擇的待測衛星,并跟蹤這些衛星的運行。當接收機捕獲到跟蹤的衛星信號后,就可測量出接收天線至衛星的偽距離和距離的變化率,解調出衛星軌道參數等數據。根據這些數據計算出用戶所在地理位置的經緯度、高度、速度、時間等信息。
1.2 GSM通信
GSM是一種廣泛應用于全世界的數字移動電話系統。GSM是目前3種數字無線電話技術(TDMA、GSM和CDMA)中使用最為廣泛的一種。用戶遍布140多個國家。許多GSM網絡擁有漫游協議,因此當到其他國家或地區之后,仍然可以繼續使用GSM通信。
2 車禍判斷
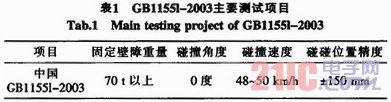
我國的汽車正面碰撞標準GB11551—2003《乘用車正面碰撞的乘員保護》是非等效采用ECE R94法規制定的。我國的法規要求是速度50 km/h下的100%正面碰撞,100%正面碰撞的意思就是,車輛正面完全撞在障礙物上,車頭的受力面為100%。表1為我國汽車制定主要測試項目,可見碰撞測試時速為50 km/h時要求汽車氣囊必須自動打開,說明汽車在50 km/h以下的速度發生碰撞還是比較安全的,而50 km/h以上的速度發生碰撞是很危險的。
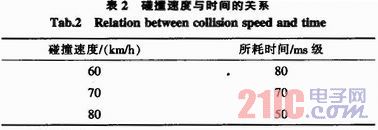
汽車在發生車禍碰撞時持續變形時間一般為40~80 ms,并隨碰撞相對速度增加,碰撞持續時間逐漸減少。碰撞速度與時間的關系如表2所示。
根據公式:
![]()
得到碰撞速度與加速度的關系如表3所示。
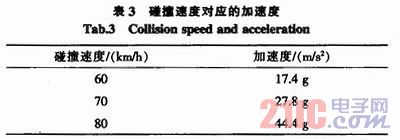
從表3可以看出碰撞速度越大加速度越大。因此車上人員受傷的可能性就更大。從加速度對應的速度60 km/h、70 km/h、80 km/h關系可以近似:
![]()
得50 km/h碰撞的近似加速度為11 g,即當加速度達到11 g時足已證明發生了汽車嚴重的碰撞事故,很大機率能讓司乘人員受傷,甚至失去生命,所以應該立刻自動發出車禍報警。
3 系統組成和原理
3.1 總系統組成
系統由車載終端、GPS衛星、系統服務器、Intemet網絡、網絡客戶端、手持電話等組成。如圖1所示。

3.2 車載終端
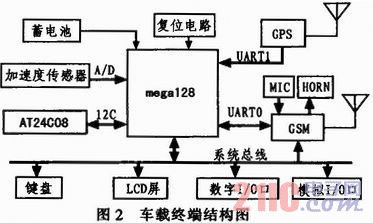
車載終端以ATmega128L為核心,集成了加速度傳感器、鍵盤、LCD屏、GSM模塊、GPS模塊、復位電路、蓄電池、擴展I/O日等,可檢測水平方向和堅直方向的加速度,檢測堅直方向的加速度只是為了防止由于重力加速度的干擾而產生誤報警,車載終端結構圖如圖2所示。
3.2.1 加速度采集
采用的ADI公司的加速度傳感器ADXL001—500BEZ振動與沖擊傳感器,其測量范圍在-500~+500 G之間,該傳感器具有0.2%滿量程范圍的出色非線性度,具有寬帶寬(諧振頻率22 kHz),可工作在-40~+125°,適合苛刻的工業環境且無需校準。十分適合系統的需求。
3.2.2 車輛定位
車輛定位采用了HOLUX GR-85智能型衛星接收模塊,他采用GSC3F衛星定位接收芯片,確保了高的接收靈敏度,內部有可充電電池,可以保存星歷數據,便于快速定位,是一個具備全方位功能的衛星定位接收器。串口數據輸出,默認波特率為4 800,每秒更新一次GPS全數據。把TXA腳和系統mega128單片機串口的RXD腳連接,終端即可得到所需要的年/月/日/時/分/秒/毫秒、當前經度、緯度、運動速度、運動方向等數據。
3.3 系統實現
圖3是車載終端主程序流程圖,終端上電后初始化串口0、串口1、從EEPROM中讀取設置通訊號碼等信息。通過A/D不斷的采集系統的加速度輸入MCU,MCU將不斷的保存獲得的加速度,并進行算法判斷是否應發出報警。系統會每秒產生一個低級中斷讀取一次GPS全數據儲存,通過對加速度的判斷,一旦達到發出報警的條件,便會編輯短信向GSM發出AT指令,使GSM發出信息。
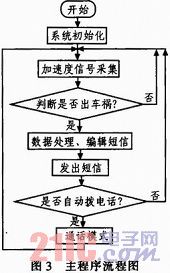
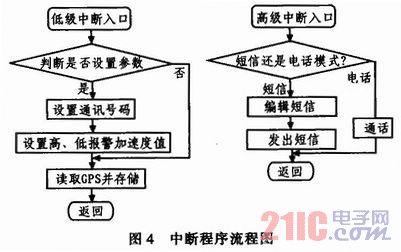
圖4為中斷程序流程圖,低級中斷是定時產生的,也可通過按鍵對各種參數和號等進行設置。高級中斷主要為手動報警模式,只要按下短信報警鍵或語音電話報警按鍵,則會立即發出報警。手動報警在防打劫汽車上也非常有用。
4 系統通信
上位機為要接收車載終端發送的信息,所以在上位機端也安裝一個GSM模塊,如圖5所示,GSM模塊自帶的串行通訊口是TTL電平,所以經MAX232芯片轉換后可直接與監控計算機RS232串口連接。當發生車禍后,車載終端上的GSM模塊會立即發送信息至上位機的GSM模塊,上位機的監控電腦便可通過串行通訊口獲得從車載終端發來的車禍信息。而且通過串行通訊口也可以控制電話模式的拔號與接聽。

5 上位機信息管理系統
上位機信息管理系統是一個汽車事故管理軟件,它能接收和記錄事故汽車的短信,其中主要包括汽車車牌、車禍時間、當前經緯度、速度、加速度,同時還記錄了系統收到信息的時間,車禍級別等。只要將經緯度輸入電子地圖就可以立刻獲得當前位置。如圖6就是基于VB開發的一個管理系統,并且可將數據存入SQL2000以便歷史數據查詢。
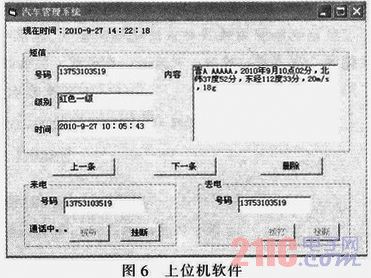
上位機信息管理系統還可以支持電話模式,電話有接聽模式和撥打模式,但在同一時間只能支持一種模式,以控制按扭的始能來控制。
6 結論
本文給出了基于加速度傳感器的車禍報警與定位系統的設計方法和功能介紹。在汽車工業高速發展的現代,汽車已成為了人們現在出行主要的交通工具之一,但是因交通事故的傷亡數量也十分巨大。在信息化的現代利用高科技去挽救人的生命將會是重大研究的主題之一,基于加速度的車禍報警系統正是懷著這種設計理念,相信這種系統的推廣,會給現在汽車行業帶來更多的安全。