
摘 要: 介紹了Sugeno型模糊推理算法的基本原理,給出了一種實現方法,并對其控制性能進行了仿真。
關鍵詞: 模糊控制器 Sugeno型模糊推理 Mamdani型模糊推理
模糊控制器是模糊控制系統的核心,通常由軟件編程實現,其控制算法的簡繁直接影響到控制器的實時性。Mamdani型和Sugeno型是兩種常用的模糊推理算法模型。在很多情況下,Sugeno型模糊推理算法具有較多的優點。
1 模糊控制器的工作過程
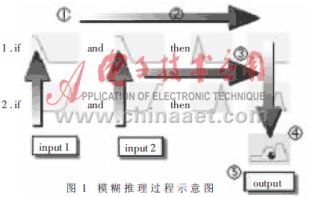
模糊推理過程就是運用模糊邏輯,進行從輸入量到輸出量映射的過程,可以分為以下5個步驟進行:
(1) 輸入量模糊化(Fuzzify Inputs)
根據對應的隸屬函數,確定輸入量的隸屬程度。輸入量是論域內的數值,輸出量是對應敘詞的隸屬度。模糊化可以通過查表或函數計算等方法實現。
(2) 模糊邏輯運算(Apply Fuzzy Operator)
當模糊推理規則的前件(Antecedent)含有幾個部分時,就需要對幾個輸入量進行模糊邏輯運算,以得到模糊邏輯推理所需的單一前件。
(3) 模糊蘊含(Apply Implication Method)
根據總結歸納的模糊規則,由前件蘊含出后件(Consequent)。在過程中,各條規則的權重(Weight)可取不同值。結果由前件和輸出量隸屬函數得出,為一系列隸屬函數表示的模糊集合。
(4) 模糊合成(Aggregate All Outputs)
將各條規則蘊含出的一系列隸屬函數合成為輸出量隸屬函數。
(5) 輸出逆模糊化(Defuzzify)
將模糊合成的隸屬函數數值化,得出模糊系統的清晰輸出量。
圖1所示為一個2輸入、2規則、1輸出的模糊推理過程示意圖。
2 Sugeno型模糊推理算法
Mamdani型模糊推理算法是最常用的模糊推理算法。Sugeno型模糊推理算法與Mamdani型類似,其中,輸入量模糊化和模糊邏輯運算過程完全相同,主要差別在于輸出隸屬函數的形式。
典型的零階Sugeno型模糊規則的形式如下:
If x is A and y is B then z=k
式中x和y為輸入語言變量,A和B為推理前件的模糊集合,z為輸出語言變量, k為常數。
在Mamdani型模糊推理算法中,輸出隸屬函數是模糊集合,經過模糊合成處理,即得到一個需要逆模糊化的輸出變量。當采用尖峰脈沖形隸屬函數替代分布形隸屬函數時,往往能使模糊推理過程簡化而有效,這就是所謂的單元素隸屬函數。單元素隸屬函數可以看作已預逆模糊化處理的模糊集合,由于不需要象Mamdani型模型那樣計算二維函數的形心,可以極大地提高逆模糊化處理過程的效率。Sugeno模型中即采用單元素輸出隸屬函數,其模糊蘊含即是簡單的乘法,模糊合成即是各單元屬輸出隸屬函數的簡單包含。
更為一般的一階Sugeno模型規則的形式為:
if x is A and y is B then z=p×x+q×y+r
式中x和y為輸入語言變量,A和B為推理前件的模糊集合,z為輸出語言變量,p,q,r為常數。更高階數的Sugeno模型規則也可以類似構成,但增加了模型的復雜性,性能卻改善不大,故很少使用。
由于各條規則與輸入量的線性關系,使得Sugeno型模型特別適合在動態非線性系統中作為不同工作狀態下多線性控制器的平滑切換。
3 Sugeno模糊控制器的實現及應用
Sugeno型模糊控制器能廣泛地用于各種工業控制系統。下面以二維通用模糊控制器在嵌入式工業控制機上的實現為例說明Sugeno型模糊控制器的編程方法。
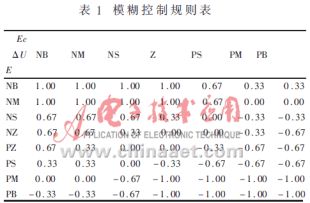
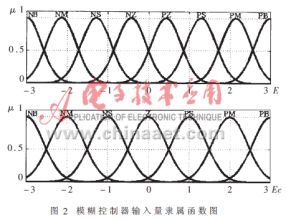
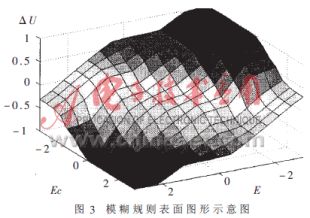
二維模糊控制器的輸入量取為偏差E和偏差變化率Ec,輸出量為控制量變化量ΔU。偏差E的語言詞集取8個,為{負大NB,負中NM,負小NS,負零NZ,正零PZ,正小PS,正中PM,正大PB};偏差變化率Ec的語言詞集取7個,為{負大NB,負中NM,負小NS,零Z,正小PS,正中PM,正大PB};輸出量變化量ΔU的語言詞集也取7個,為{負大NB,負中NM,負小NS,零Z,正小PS,正中PM,正大PB}。輸入量E和Ec的隸屬函數形式取為常用的高斯形(Gauss-type),其形狀如圖2所示。如輸出量變化量ΔU的隸屬函數形式也取為高斯形,就是Mamdani型模糊推理算法的模糊控制器。為構成Sugeno型模糊控制器,我們取輸出量為單元屬隸屬函數,具體為{負大NB=-1,負中NM=-0.667,負小NS=-0.333,零Z=0,正小PS=0.333,正中PM=0.667,正大PB=1}。模糊推理規則共56條,詳見表1模糊控制規則表,其表面圖形示意圖見圖3。
 ?
?
控制器模糊運算方法及逆模糊化方法分別取為:
模糊AND運算為:prod(x,y)=x×y
模糊OR運算為:probor(x,y)=x+y-x×y
逆模糊化運算為加權平均法:ΔU=
經過上述各項定義,Sugeno型模糊控制器的模型已經完全確定。為方便起見,可以選MATLAB軟件作為編程平臺。首先,利用MATLAB的可視化模糊邏輯工具FUZZY命令建立文件名為SUGENO.FIS的模糊算法模型,由于MATLAB的FUZZY工具支持多種隸屬函數、模糊運算、模糊推理及逆模糊化算法,上述Sugeno模型可以很快建立,而且在可視化環境中完成。下一步是利用MATLAB環境中提供的C/C++編譯工具COMPILER V2.0進行編譯。SUGENO.FIS的模糊算法模型中使用了FUZZY工具中較多的M文件,如evalfis.m、guessmf.m等,須一并編譯。在MATLAB環境下,用mcc命令即可編譯得到SUGENO.C和SUGENO.H。該C/C++源程序代碼完全支持ANSIC,可以作為程序模塊應用于嵌入式或其它工業控制機系統中(須MATLAB C/C++庫支持)。至此,基于Sugeno模糊推理算法的二維模糊控制器已經實現。
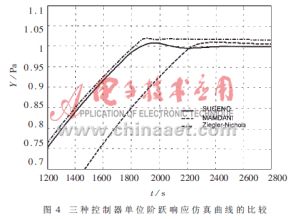
為驗證Sugeno型模糊控制器的性能,在MATLAB的SIMLINK環境中,構造了一個控制系統,對工業控制系統中常見的大滯后、大慣性被控對象:

進行了仿真。為比較不同控制算法的差異,還同時對Mamdani型模糊推理算法和Ziegler-Nichols型PID控制算法進行了仿真。仿真結果如圖4所示。可以看出,Sugeno型模糊推理算法除了具有模型簡單、實時計算快的優點外,其控制性能也比較優異。
Mamdani型模糊推理算法具有直觀、已普遍被人們接受和比較適合于人類輸入的控制系統等優點。由于采用了單元屬隸屬函數以及輸出與輸入的線性關系,Sugeno型模糊推理算法則具有下列優點:
(1)具有較高的計算效率,適用于實時性要求高的系統;
(2)能與線性系統、優化控制和自適應控制系統很好地結合;
(3)能保證控制器輸出的平滑性;
(4)比較適合于具有精確數學分析的控制系統,特別是多線性模型的平滑切換。
參考文獻
1 馮冬青.模糊智能控制.北京:化學工業出版社,1998
2 魏克新.MATLAB語言與自動控制系統設計.北京:機械工業出版社,1997
3 王順晃.智能控制系統機器應用.北京:機械工業出版社,1998
4 陶永華.新型PID控制及其應用.北京:機械工業出版社,1998
5 The MathWorks Inc.Fuzzy Logic Toolbox User′s Guide(Version 2).1999