
本系統以單片機AT89C51 為電動車的控制核心, 利用紅外遙控器配以紅外接收頭及直流電機的正反轉控制電路來實現電動車的運動控制。系統由紅外線遙控器, 紅外線接收模塊, 電動機驅動模塊, 顯示及聲光指示模塊, 方向控制模塊等幾部分組成。系統流程如圖1, 原理框圖如圖2.
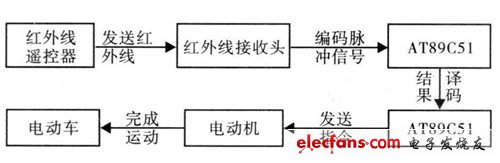
圖1 原理流程圖

圖2 系統框圖
1 紅外遙控系統
通用紅外遙控系統由發射和接收兩大部分組成, 應用編/ 解碼專用集成電路芯片來進行控制操作, 如圖3 所示。發射部分包括鍵盤矩陣、編碼調制、LED 紅外發送器; 接收部分包括光、電轉換放大器、解調、解碼電路。
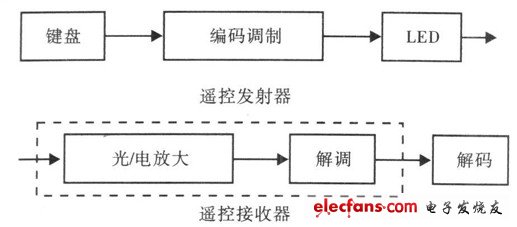
圖3 紅外遙控系統框圖
1. 1 遙控發射器及編碼
當發射器按鍵按下后, 即有遙控碼發出, 所按的鍵不同遙控編碼也不同。這種遙控碼具有以下特征:
采用脈寬調制的串行碼, 以脈寬為0. 565 ms、間隔0. 56 ms、周期為1. 125 ms 的組合表示二進制的"0"; 以脈寬為0. 565 ms、間隔1. 685 ms、周期為2. 25 ms 的組合表示二進制的" 1" , 其波形如圖4 所示:
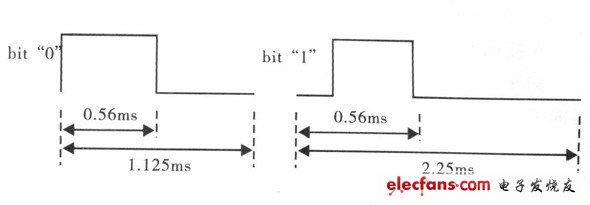
圖4 遙控編碼的"0"和"1"
上述" 0"和"1"組成的32 位二進制碼經38 kH 的載頻進行二次調制以提高發射效率, 達到降低電源功耗的目的。然后再通過紅外發射二極管產生紅外線向空間發射。
1. 2 接收器及解碼
解碼的關鍵是如何識別"0"和"1" , 從位的定義我們可以發現" 0" 、"1"均以0. 56 ms 的低電平開始, 不同的是高電平的寬度不同,"0"為0. 56 ms, "1"為1. 68 ms, 所以必須根據高電平的寬度區別"0"和" 1" .如果從0. 56 ms 低電平過后, 開始延時, 0. 56 ms 以后, 若讀到的電平為低, 說明該位為"0" , 反之則為"1" , 為了可靠起見, 延時必須比0. 56 ms 長些, 但又不能超過1. 12 ms, 否則如果該位為"0" , 讀到的已是下一位的高電平, 因此取( 1. 12 ms+ 0. 56 ms) / 2= 0. 84 ms 最為可靠, 一般取0. 84 ms 左右均可。
根據碼的格式, 應該等待9 ms 的起始碼和4. 5 ms 的結果碼完成后才能讀碼。單片機雙機通信#e#
2 單片機雙機通信
AT89C51是一種帶4K 字節閃爍可編程可擦除只讀存儲器的低電壓、高性能CMOS8 位微處理器, 俗稱單片機。
多個MCS- 51 單片機可利用串行口進行多機通信。在多機通信中, 要保證主機與所選擇的從機實現可靠的通信, 必須保證串行口具有識別功能。串行口控制寄存器SCON 中的SM2 就是為滿足這一要求而設置的多機通信控制位。其多機控制原理是在串行口以方式2( 或方式3) 接收時, 若SM2= 1, 表示置多機通信功能, 這時出現可能情況: ( 1) 接收到的第9 位數據為1 時, 數據才裝入SBU F, 并置中斷標志RI= 1 向CPU 發送中斷請求; ( 2) 接收到的第9 位數據為0 時, 則不產生中斷標志, 信息將被拋棄。
若SM2= 0, 則接收的第9 位數據不論是0 還是1, 都產生中斷標志, 接收到的數據裝入SBUF 中。
雙機通信的工作過程如下: ( 1) U2 初始化程序允許串行口中斷, 將串行口變成為方式2 或方式3接收, 即9 位異步通信方式, 且置SM2 和REN 位為1, 使U2 只處于雙機通信且接收地址幀的狀態; ( 2)在U1 和U2 通信時, U1 發送地址信息的第9 位為1, 數據( 包括命令) 信息的第9 位為0.U 2 的串行口接收到的第9 位信息RB8 為1, 且由于SM2= 1, 則置1 中斷標志位RI, U2 響應中斷, 執行中斷服務程序; ( 3)接著U 1 發送數據幀, U 2 接收數據幀, 然后進行處理。
3 電動機的驅動
L298N 是一款較常用的高電壓大電流全橋雙路電機驅動芯片, 用T TL 電平輸入控制信號即可實現對伺服電機、直流電機及步進電機等多種電機的控制。一片L298N 中包含了兩路控制放大電路,用它可以構成兩個同類型的控制電路。
取其中的一路構成的電機控制電路如圖5 所示。其中, 13、14 腳為電機控制輸出端, 直接接在電機的兩個輸入端; 10、11、12 腳為邏輯電路輸入端, 可以直接與單片機、PLC 等控制芯片相連; 9 腳VSS 接+ 5V 的邏輯電路電源, 4腳VS 接電機的電源, 電壓大小即電機額定輸入電壓; 8 腳接地。
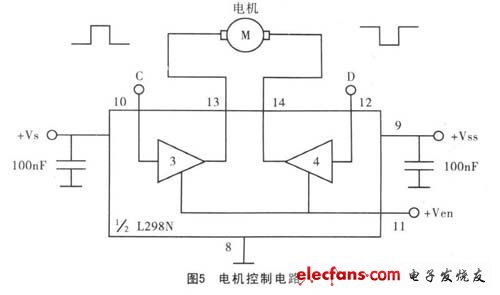
只要通過控制電路對C、D 兩個輸入端輸入T TL 電平的0 或1 即可控制電機的正轉、反轉及停止。
當向C、D 兩端輸入同樣電平時, 可實現電機的快速停止。另外將使能端V en 置零也可以使電機停止。
4 電機的PWM 調速
在直流伺服系統中, 速度調節主要通過改變電樞電壓的大小來實現。 經常采用晶閘管相控整流調速或大功率晶體管脈寬調制調速兩種方法, 后者簡稱PWM, 常見于中小功率系統。它采用脈沖寬度調制技術, 其工作原理是: 通過改變“接通脈沖”的寬度, 使直流電機電樞上的電壓的"占空比"改變, 從而改變電樞電壓的平均值, 控制電機的轉速。PWM 電路由四個大功率晶體管組成H 橋電路構成, 四個晶體管分為兩組, 交替導通和截至, 用單片機控制達林頓管使之工作在開關狀態, 根據調整輸入控制脈沖的占空比, 精確調整電動機轉速。這種電路由于管子只工作在飽和和截止狀態下, 效率非常高。H 型電路使實現轉速和方向的控制簡單化, 且電子開關的速度很快, 穩定性也極強, 是一種廣泛采用的PWM 調速技術。
5 顯示電路
常用的數碼顯示器件主要有LED 數碼顯示器和LCD 液晶顯示器, 本系統采用LED 顯示器。它是用發光二極管( 簡稱LED) 組成字形來顯示數字、文字( 主要是拉丁字母) 和符號的。同一規格的數碼管一般都有共陽極和共陰極兩種類型。本設計采用共陰型。其電路圖如圖6 所示。其中74LS247 為譯碼器, 引腳如圖7 所示。


6 結語
本文用紅外遙控器來實現電動車的運動狀態控制, 利用紅外遙控器發送指令, 指令信號經紅外接收頭接收、處理后轉換為脈沖信號, 然后發送到單片機進行譯碼。單片機譯碼后, 根據預先編寫好的程序, 輸出相應的指令, 通過電動機的控制電路, 從而控制電動機的運動, 實現對電動車的運動控制的目的。如把設計中的直流電動機換成伺服電機, 再配合單片機可以精確的控制伺服電機的動作, 凡是需要以單片機控制想要拉動或是做簡易的機械式傳動的機構設計都可以應用這種設計。