
單片機雙機并行通信中所遇問題及解決方法
摘要: 本系統采用的CPLD為 ATMEL公司生產的ATF1540AS器件,該器件是一種高性能、高密度復合可編程邏輯器件,簡稱CPLD,它利用ATMEL 的電可擦除存儲器技術,有 64個邏輯宏單元和68個I/O端口,很容易和多個TTL、SSI、MSI、LSI和經典的PLDS組合使用。每個宏單元包括積項和積項多路選擇器、 OR/XOR/CASCADE邏輯、觸發器、輸出選擇和使能、輸入邏輯陣列五個部分。ATF1504AS的增強選路開關增加了可用的門計數,提高了管腳鎖存設計修改的成功率。
Abstract:
Key words :
1 引言
本系統主要應用于雙CPU電腦刺繡機中。為了減輕下位機的控制負擔,更好的完成花樣的刺繡。其次為下一步脫機工作做準備(即在機器刺繡的同時,為刺繡下一個花樣做準備工作),這樣一來,可以進一步提高工作效率。由于系統在最初研發中遭遇程序跑飛問題的困擾,于是提出了采用CPLD(可編程邏輯器件)的方式,以解決通訊干擾問題。
本系統采用的CPLD為 ATMEL公司生產的ATF1540AS器件,該器件是一種高性能、高密度復合可編程邏輯器件,簡稱CPLD,它利用ATMEL 的電可擦除存儲器技術,有 64個邏輯宏單元和68個I/O端口,很容易和多個TTL、SSI、MSI、LSI和經典的PLDS組合使用。每個宏單元包括積項和積項多路選擇器、 OR/XOR/CASCADE邏輯、觸發器、輸出選擇和使能、輸入邏輯陣列五個部分。ATF1504AS的增強選路開關增加了可用的門計數,提高了管腳鎖存設計修改的成功率。
2 系統結構
系統的CPU采用W77E58,由ATF1504AS構成通信接口,系統框圖如圖1所示。
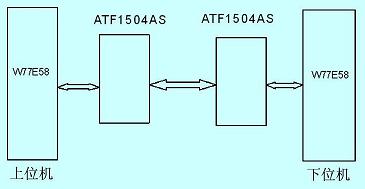
圖1 雙機通信框圖
2.1 問題提出
電腦刺繡機為達到良好的人機界面交互功能,采用上下位機方式,下位機主要進行繡花動作的控制,上位機主要進行花樣的跟蹤。為了實現繡花的同時在液晶屏上進行繡花跟蹤,單CPU方式存在系統資源透支, CPU處理數據將十分困難,于是提出了采用雙CPU的工作方式,但同時帶來一個問題—雙CPU的通信問題。
2.2 解決方案
(1) 采用串行通信方式
優點:在由單片機組成的多機方式中,串行接口方式是最常用的。串行通信方式接口電路簡單,可以方便實現長距離傳輸。抗干擾能力比較好。
缺點:傳輸數據慢,不適合實時數據傳輸。在數據傳輸要求高的情況下,容易造成瓶頸堵塞現象。
(2) 采用并行通信方式
優點:并行通信傳輸數據快,適合進行實時控制。
缺點:抗干擾能力差,不適合長距離傳輸,最大距離不超過5m。
由于本系統對數據傳輸的實時性要求比較高,并且上下位機之間的距離不超過3m,進行適當的抗干擾措施,完全可以達到系統的要求,所以確定采用并行通信方式。
2.3 具體措施
(1) 采用ATF1504AS(可編程邏輯器件)進行并行通信,減少分立器件所產生的雜散電容而帶來的噪聲干擾。
(2) 在輸入數據端加斯密特電路(74LS14),將外部傳輸線上耦合噪聲濾除掉。從而提高總線接收的抗干擾性能。
(3) 采用三態門驅動方式可以提高總線的抗干擾能力,因為三態門有三種狀態輸出,既所謂的低阻高電平、低阻低電平、高阻態(禁態)。由于三態門的輸入具有的三態性,所以使三態門的信號源的負擔減輕。有利于提高速度和抗干擾能力。
3 雙CPU通信原理設計
3.1 雙CPU通信原理圖
從圖2雙CPU通信原理圖中可以看出,在輸入接口上都接上74LS14斯密特電路和74LS244三態門驅動器,以提高抗干擾能力。在SRZB、SCYX(上位機)及SRZB、SCYX(下位機)的握手信號線上接入74LS14斯密特電路,以提高抗干擾能力。
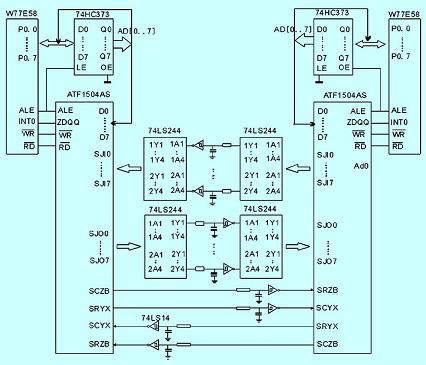
圖2 雙機通信原理圖
3.2 ATF1504AS內部原理圖
由于篇幅有限,僅列出上位機的ATF1504AS的內部原理圖如圖3,下位機的ATF1504AS的內部原理圖與此相類似。
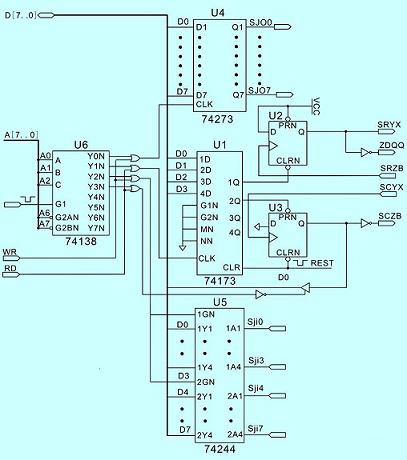
圖3 ATF1504AS內部原理圖
4 系統工作原理
4.1 上位機輸入數據
如圖3所示。在輸入數據以前,通過對U1(74173)給U2(D觸發器)進行初始化,即對U2的CLRN端輸入一上升沿的脈沖,使U2清零。此時上位機 SRYX端為低電平,ZDQQ端為高電平。此時為接收數據做好準備。當下位機接收到上位機的SRYX端輸出的低電平時,就可以發送數據到鎖存器中,緊接著給上位機的SRZB端輸出一個上升沿脈沖,U2的Q端(SRYX端)輸出正脈沖,ZDQQ端經過反相器輸出負脈沖。上位機在檢測到ZDQQ端為低電平時,將數據線上的數據取出。緊接著通過對UI給U2進行進行初始化,完成對一個字節的讀取,并為讀取下一個字節做好準備。上位機輸入數據信號波形圖如圖5所示。
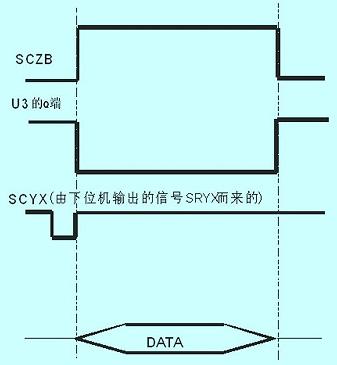
圖4 上位機輸出數據時信號波形圖
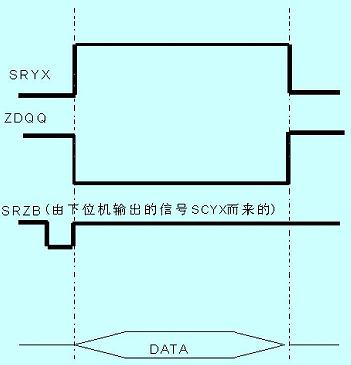
圖5 上位機輸入數據時信號波形圖
4.2 上位機輸出數據
如圖3所示在輸出數據以前,通過對U1 (74173)給U3(D觸發器)進行初始化,即對U3的PRN端輸入一上升沿的脈沖,使U3輸出置1。此時上位機的SCZB端經反相器輸出低電平,U3 的Q端為高電平。此時為發送數據做好準備。當上位機的SCYX端接收輸入的上升沿脈沖時,U3的Q端為低電平,當CPU檢測到Q端為低電平時,就可以發送數據到鎖存器中,緊接著通過上位機的SCZB端向下位機SRZB端輸出一個上升沿脈沖。表示已發送數據,接著通過對U1給U2進行進行初始化。完成對一個字節的輸出,并為輸出下一個字節做好準備,上位機輸出數據信號波形圖如圖4所示。
5 軟件設計
5.1 程序流程設計
圖6示出輸入數據流程圖,圖7示出輸出數據流程圖。
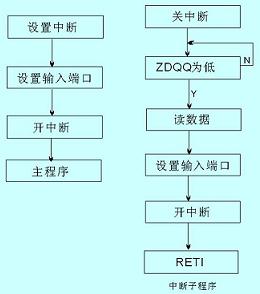
圖6 輸入數據流程
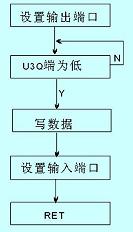
圖7 數據輸出程序流程圖
5.2 部分程序清單
(1) 輸入數據程序清單
ORG 0000H
JMP START
ORG 0003H
JMP RESEVE
START: MOV TCON,#0 ;設置中斷INT0
MOV TMOD,#11H
CALL SZSRDK ;設置輸入端口
MOV IE,#81H
MOV IP,#1 ;開中斷
..
..
..
RESEVE: CLR EA ;開中斷
PUSH PSW
PUSH DPH
PUSH DPL
RESEV1: JB ZDQQ,RESEV1
;判ZDQQ是否為低
MOV DPTR,#ADDR0
;為U5(輸入數據端口)的地址
MOVX A, @DPTR
..
..
CALL SZSRDK
POP DPL
POP DPH
POP PSW
SETB EA
RETI
SZSRDK: CLRN EQU 2CH.0
CLR CLRN ;
MOV DPTR,#ADDR1
;為U1的地址
MOV A,2CH
MOVX @DPTR,A
SETB CLRN
MOV A,2CH
MOV DPTR,#ADDR1
MOVX @DPTR,A
RET
(2) 輸出數據程序清單
SEND: MOV DPTR,#ADDR3
MOVX A,@DPTR
JB ACC.0,SEND
;為U3的Q端輸出
MOV DPTR,#ADDR4
;為U4(輸出端口)的地址
MOVX @DPTR,A
CALL SZSCDK
RET
SZSCDK: PRN EQU 2CH.1
SETB PRN
MOV DPTR,#ADDR1
;為U1的地址
MOV A,2CH
MOVX @DPTR,A
CLR PRN
MOV DPTR,#ADDR1
MOV A,2CH
MOVX @DPTR,A
RET
6 結束語
設計中采用了AT1504AS器件,該器件實現了硬件設計軟件化,方便了硬件設計,縮短了設計周期,降低了設計成本,應用也十分方便,該系統經過采取以上措施后,以達到最初的設計要求。現產品已投放市場,市場的反映良好。
此內容為AET網站原創,未經授權禁止轉載。