
由于DSP將超強的高速實時處理能力和豐富的外設功能集于一身,目前,以DSP為核心的嵌入式運動控制器已經成為開放式運動控制器的發展主流,并獲得廣泛的應用。本文通過對運動控制器基本功能的研究,在分析、消化已有的基于DSP的運動控制器硬件資源基礎上,開發了運動控制器的軟件系統,詳細介紹了運動控制器的軟件設計。
1 運動控制器硬件結構
本運動控制器的硬件結構主要分為如下幾個模塊:DSP+CPLD 主控模塊,包括 DSP 核心 模塊和 CPLD 驅動與擴展模塊;通信接口模塊,包括 PCI 總線、USB 總線和串口;I/O 輸入輸 出接口模塊以及外圍存儲器模塊,包括 SRAM 和 FLASH。本運動控制器的硬件結構如圖 1 所示。

圖1 運動控制器硬件結構圖
1.1 DSP+CPLD 主控模塊
本系統采用了 TI 公司的 TMS320F2812 DSP 為控制核心,這是工業界首批 32 位的控制 專用、內含 FLASH 以及高達 150MHz 主頻的數字信號處理器,專門為工業自動化、光學網絡及自動化控制等應用而設計的。TMS320F2812 采用哈佛總線結構,有獨立的程序和數據空間;具有很強的運算能力,能夠實時地處理許多復雜的控制算法;片上內存豐富,可支持45 個外設級中斷和 3 個外部中斷,提取中斷向量和保存現場只需 9 個時鐘周期,響應迅速; 片上集成了多種先進的外設,包括兩個事件管理器(EV)、12 位 A/D、兩個串行通信接口(SCI)、一個串行外圍接口(SPI)以及一個多通道緩沖串行接口(McBSP)等;其通用輸 入/輸出多路復用器(GPIO)擁有多達 56 個 I/O 口,在系統的軟件開發中正是利用了這些豐富的內外設資源,才實現了系統要求的各種功能。
本系統中選用的 CPLD 是 Altera 公司 MAX3000A 系列的 EPM3128,這是一款高性能、 低功耗的基于 EEPROM 的 PLD。由于本系統的控制對象是步進電機,所以設計中主要利用TMS320F2812 的 GPIO 口進行電機控制接口與 I/O 接口的輸入輸出,但是由于 TMS320F2812是低功耗處理器,其 GPIO 引腳的輸出驅動能力有限,而且由于 DSP 是主控核心,負載比 較多,所以將所有輸出信號都經過 CPLD 驅動后輸出,提高信號的驅動能力。此外,CPLD還用于系統電路的譯碼,增加系統設計的靈活性和可擴展性。
1.2 通信接口模塊
本系統在用作插卡式運動控制時利用 PCI 總線實現 DSP 與 PC 的通信。PCI(PeripheralComponent Interconnect 外圍部件互聯)總線是 Intel 公司聯合其他 100 多家公司于 1992 年推 出的基于新一代處理器的一種局部總線,是一種高性能 32/64 位數據/地址復用總線,能為 CPU 及外設提供高性能數據。PCI 總線具有嚴格的規范,目前已經發布了 PCI V1.0 和 V2.1規范,保證了其良好的兼容性;PCI 總線與 CPU 無關,與時鐘頻率也無關,可適用于各種平臺,支持多處理器和并發工作;PCI 總線可以提供極高的數據傳輸速率,還具有良好的擴 展性。因此,PCI 總線在基于計算機總線的運動控制系統,即“PC+運動控制器”的結構中應用十分廣泛。
本系統選用 CYPRESS 公司的 CY7C68001 芯片實現 PC 機和 DSP 之間的 USB 通信。CY7C68001 是通用 USB2.0 接口控制器,它是基于應用層編程的接口器件,相對于其它基于 鏈路層編程的接口器件,使用和開發都很方便。本系統采用 DSP 片上的 SCI 串行通信模塊以及 MAX232 芯片轉換成標準 RS-232 的通 信信號,實現正常的串口通信。
1.3 I/O 輸入輸出接口模塊
本系統的輸入/輸出是通過 CPLD 的邏輯控制來實現的,以提高系統的工作可靠性和設 計柔性。考慮到運動控制器的可擴展性以及 DSP 的 GPIO 引腳的數量,共設計了 16 路數字量輸出通道和 16 路數字量輸入通道。數字量輸出通道主要用于各軸方向、脈沖信號的輸出以及一些外部設備的啟停控制,如主軸及冷卻液的開關控制等;數字量輸入通道可根據用戶 具體要求來定義其用途,如作為傳感器接口,用于零點、限位信號的輸入等。為提高系統應用的靈活性,系統輸出采用了普通輸出和差分輸出兩種方式,具體使用可由用戶自行設定。
1.4 外圍存儲器模塊
TMS320F2812 芯片內部包括 128KB 的 FLASH 和 18KB 的 SARAM,其中 128KB 的FLASH 用來存儲系統軟件程序已經足夠,但是在實際使用中,考慮到運動控制指令和加工程序需要通過 USB 總線或 PCI 總線下載到運動控制器中,且 DSP 在工作過程中需要處理大 量的數據,僅依靠 DSP 芯片內部的存儲空間遠遠不夠,所以考慮外擴一片 FLASH 和一片SRAM 作為用戶加工程序存儲器和系統的工作存儲器,它們通過 CPLD 完成與 DSP 之間的讀寫操作。
本系統選用了 Intel 公司的 E28F128 FLASH 和 ISSI 公司的 IS61LV51216SRAM。E28F128 是一種采用 CMOS 工藝制成的 8MB FLASH,其讀寫訪問時間為 150ns,此讀寫周期已經 大于 DSP 對外部端口的讀寫周期,為了能夠和 DSP 的讀寫周期進行匹配,在對 FLASH 進 行讀寫操作過程中必須插入等待周期。IS61LV51216 是一種高速異步靜態 512KB 的 SRAM, 其讀寫周期為 10ns,與 DSP 之間可以無需插入等待周期便可以進行讀寫操作,并可以直接映射到 DSP 外部存儲接口的 Zone2 或者 Zone6 區域。
2 運動控制器軟件結構
2.1 系統軟件功能設計
運動控制器通常作為一個獨立的過程控制單元用于工業自動化生產中,它的功能是由硬件和軟件共同實現的硬件為軟件運,行提供了支撐環境,軟件負責實現系統要求的所有功能。本系統軟件需要完成控制和管理兩大任務,圖 2 表示的是其軟件功能結構。
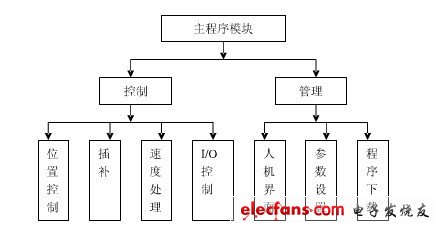
圖2 運動控制器軟件功能結構圖
其中,系統的控制包括位置控制、插補、速度處理和開關量 I/O 控制等,這類任務的實 時性很強,所以軟件程序的優先級也較高;系統的管理包括人機界面顯示、參數設置和程序 下載等,這類任務的實時性要求不高,所以軟件程序的優先級也相對較低。可以說,一個運 動控制系統的基本功能均由上述功能的子程序實現,通過增加子程序可進一步增加系統的功 能。
要實現這些功能,必須做好運動控制器的軟件規劃,劃分各個功能模塊,才能在 DSP 芯片上設計運行程序。本系統軟件主要分為兩個層次,包括 PC 層軟件和 DSP 層軟件,其中PC 層軟件在單板式運動控制中主要實現加工程序的傳輸和下載等功能;在插卡式運動控制中,除此之外,還需實現加工情況顯示、加工命令發送等人機交互界面的功能。 運動控制器的主要功能由 DSP 層完成,本課題的主要任務也是 DSP 層軟件的程序實現,具體包括:
1.運動控制 運動控制功能是運動控制器的主要功能,包括位置控制、插補和輔助功能的輸入輸出I/O 控制。本系統基本功能是實現 XYZ 三軸的運動控制,包括三軸聯動的直線插補運動和任意兩軸圓弧插補運動,可以實現步進電機的運動控制,提供單脈沖(即脈沖+方向)和雙脈 沖(即脈沖+脈沖)兩種控制方式。
2.速度控制 速度控制即調速,利用加減速算法,實現系統的平穩運動。系統設計空行程時的運動速度不小于 100KHz,加工過程中的插補運動速度不小于 40KHz;當脈沖當量為 2.5 微米時可達到的空行程和加工的最高速度分別為 15m/min 和 6m/min。
3.通信功能 運動控制器不是一個孤立封閉的系統,它必須和外界交換數據,主機通信主要完成兩個 任務:一個是程序的下載,另一個是控制指令的發送和加工狀態的反饋。根據單板式控制和插卡式控制兩種不同的應用,分別有不同的通信方式。其中,在單板式控制中,通過 USB總線進行程序下載而通過串口進行控制指令的發送和加工狀態的反饋;在插卡式控制中,兩種任務都是由 PCI 總線來完成。本系統的多用性特點主要體現在通信方式的不同上,支持PCI 總線方式、USB 總線方式以及異步串行總線方式,供用戶自由選擇。
4.參數設置 作為開放式運動控制器,應該允許用戶對控制系統的各運動參數進行實時調整與修改。
本系統設計將各參數存放在 FLASH 中,允許用戶通過人機界面對參數進行修改,修改后的參數將在下次操作中起作用。
2.2 系統軟件層次設計
DSP軟件采用模塊化和層次化的設計思路,為使結構清晰,整個系統軟件按功能群分割為多個文件分別處理和完成相應的任務,主要分為三個層次:
1 主控層:不涉及具體操作,只負責各個任務調度、中斷安排、時間和優先級處理等, 主控層只有一個文件 main.c,包括主函數和中斷函數,在主函數和中斷函數中調用算法層的函數來實現系統的各個功能。
2 算法層:負責具體任務執行,控制算法實現,系統的主要功能都在算法層實現,包 含的模塊由系統要求的各個功能來決定,算法層主要用以實現運動控制、速度控制和系統管理等功能,各模塊之間通過標志位來聯系,不互相調用。
3 接口層:負責與硬件的接口,所有與外設有關的操作都在該層進行處理,接口層中 包括 DSP 硬件資源的定義、系統硬件的驅動等。除接口層外,系統其它層的程序禁止直接對外設進行操作,接口層直接對外設進行操作的函數盡可能做到功能完善。 綜上所述,本系統根據以上功能和層次進行軟件設計并遵循以下原則:
(1)全局性:盡量保證系統各模塊負載均衡;
(2)正確性:數學推導嚴密,盡可能利用試驗驗證;
(3)結構化:軟件設計做到層次化、模塊化、封裝化;
(4)規范性:保證程序的易讀性、移植性和可維護性。
3 小結:
本文作者創新點是運動控制是數控技術的核心,近年來,隨著開放式數控系統的發展, 開放式運動控制器也得到了前所未有的發展。運動控制器作為一個獨立的工業自動化控制類標準部件,已經被越來越多的產業領域接受,并形成了令人矚目的市場規模。本文介紹了運動控制器的總體設計方案,包括運動控制器的硬件平臺以及軟件設計思路。