
作者:曹健安,張中煒,朱曉鋒,馮宇晟
無刷直流電機具有結構簡單、效率高、功率因數高、轉動慣量小,低噪音等優點。近年來,永磁無刷直流電動機的研究和應用越來越受到人們的重視,隨著國家對節能減排的重視。越來越多的空調廠商把無刷直流電動機應用在變頻空調壓縮機中。在傳統的無刷直流電機驅動控制系統中,都需要轉子位置和速度信息作為反饋信號,而轉子位置、速度的取得幾乎都是利用光電編碼器、旋轉變壓器等精密的機械裝置獲得。在空調壓縮機中,由于制冷劑的強腐蝕性,常規的位置傳感器很難正常工作,因此,研究一種可靠的,低成本的無位置傳感器的控制方法,成為無刷直流電機控制器研究的熱點之一。文中采用ST公司近年來推出的低成本、高性能的STM8S208RB微處理器作為控制核心,采用片內AD直接采樣非導通相的端電壓作為檢測方案,具有較高的性價比,實現了變頻空調控制器的設計。
1 意法半導體STM8S208RB單片機簡介
STM8S208RB是意法半導體一種高性能內核的單片機,具有增強的Harvard&CISC架構,運行速度高,處理能力強,具有豐富的片內外設,便于使用和模塊化設計,被廣泛應用于無刷直流電機的控制。該單片機具體性能指標如下:1)內核:2.95~5.5 V的寬工作電壓,-40~+125℃工作環境溫度,具有3級流水線結構,在24 M晶振頻率工作時,可達20 MIPS。2)程序存儲器:最多128 K字節Flash;10 K次擦寫后在55℃環境下數據可保存20年。數據存儲器:多達2 K字節可擦寫數據存儲區eeprom,可達30萬次擦寫;RAM:多大6 K字節;3)定時器:2個16位通用定時器,1個16位高級控制定時器,帶4個CAPCOM通道,3個互補輸出,死區插入和靈活的同步功能。4)可達16個通道的10位A/D轉換器,最小轉換時間為2.33μs。
2 無刷直流電機無位置傳感器控制技術
2.1 空調壓縮機及無刷直流電機的組成結構
在使用無刷直流電機的空調壓縮機系統中,主要由壓縮機、電機和控制器3個部件分組成。無刷直流電機的電機本體類似于永磁同步電機結構,其定子是電樞,轉子是永磁體,稀土永磁材料的使用,大大減小了無刷直流電機的重量、簡化了結構、提高了性能,相比普通直流電機,它去掉了由換向器和電刷組成的機械接觸結構,采用電子開關換向裝置,使其可靠性得以提高。當無刷直流電機定子繞組的某一相通以電流時,該電流產生的磁場與轉子永久磁鋼產生的磁場相互作用產生轉矩,驅動轉子旋轉。驅動電路中的功率開關器件的導通次序產生的磁場是與轉子轉角同步的,從而起到了機械換向器的換向作用。
2.2 無刷直流電機的數學模型
無刷直流電機在理想情況下具有平頂寬度120°的梯形波反電動勢,電機通過電子開關輸出方波電壓或電流,并與電機反電動勢保持適當的相位關系,從而產生有效電磁轉矩,使電機運轉。目前所使用的無刷直流電動機多采用三相星型繞組,工作在兩兩導通、三相六狀態方式下,如圖1所示。

對于采用繞組Y型聯結,三相六狀態120°兩兩通電方式的永磁無刷直流電動機。假設無刷直流電機三相繞組對稱,則三相電壓方程可以表示為:
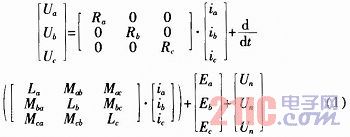
式中Ua,Ub,Uc電機三相繞組對地電壓(端電壓);ia,ib,ic電機三相繞組電流;Ea,Eb,Ec,電機三相繞組反電動式;Ra,Rb,Rc電機三相繞組電阻;La,Lb,Lc電機三相繞組的自感;Un為中性點對地的電壓;Mab為A相繞組和B相繞組的互感,其他同理。由假定可知,Ra= Rb=Rc=R;La=Lb=Lc=Ls;Mab=Mac=Mba=Mbc=Mca=Mcb=M;ia+ib+ic=0;如果令L=Ls-M,代入公式,整理得:

2.3 反電動勢過零檢測技術
永磁無刷直流電機的運行需要檢測轉子位置信號來實現換相,在空調壓縮機系統中,通常使用無位置傳感器技術。無位置傳感器的方法有反電勢法、磁阻法、磁通鏈變化法、電感法;上述各種轉子位置信息檢測方法均有各自的優點及缺點,需要根據具體情況綜合其優缺點提出合理的方案。針對空調壓縮機對無刷直流電機對可靠性、穩定性的要求較高、對精確性要求較低的特點,在本系統中使用檢測反電勢過零點方法進行轉子位置信息檢測。系統采用二二導通、三相六狀態導通方式、調制方式為H-PWM-L-ON即上橋臂開關管斬波,而另一導通相下橋臂開關管常通。
設電機處于120°導通狀態:在PWM“ON”狀態,T1、T4導通,如圖2所示;在PWM“OFF”狀態,T6導通,T1關斷,如圖3所示。
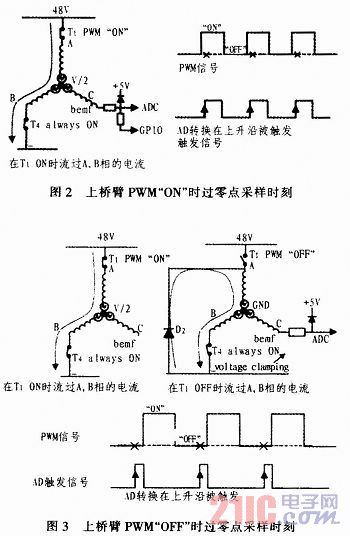
1)PWM開通時過零檢測法
在PWM“ON”狀態,T1、T4導通,如圖2所示,三相端電壓表達式如下:
根據以上公式,知道在PWM“ON”時只要檢測到C相端電壓等于Ud/2時,就是C相的過零點。
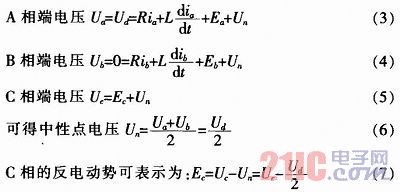
2)PWM關斷時過零檢測法
在PWM關斷狀態,T1關斷,T4導通,此時電流流過T2內部的體二極管如圖3所示,由圖可得
AB相端電壓Ua=Ub=0 (8)
C相端電壓Uc=Ec丘 (9)
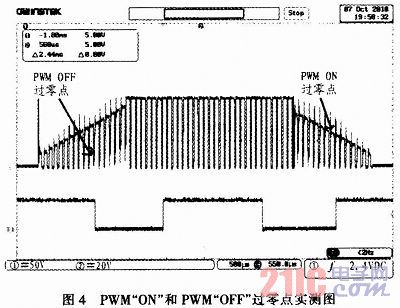
此時中性點電壓Un=0;C相反電動勢為Ec=Uc;根據以上公式,知道在PWM“OFF”時檢測到C相端電壓為0時,就是C相的過零點。圖4為PWM“OFF”和PWM“ON”情況下的端電壓和過零點實測圖。
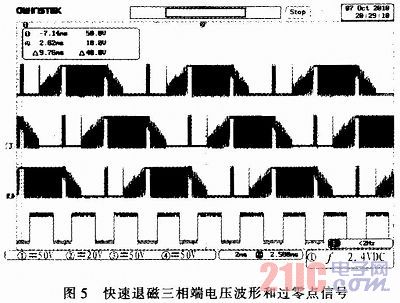
2.4 快速退磁技術
為正確檢測到反電動勢過零信號,必須在檢測之前確保斷電相電流盡快衰減,即斷電相退磁。當控制無刷直流電機換相時,由于繞組線圈電感的作用,斷電相繞組的電流不能馬上衰減到零,由于反并聯二極管的續流作用,該相端電壓被箝位至0 V或者高壓,因此在退磁期間無法進行反電動勢過零檢測。所以必須加速退磁過程,保證電機穩定性。斷電相續流過程可以等效成該相電感與電壓源并聯并為之充電,因此如果在換相時刻給關斷相施加反向電壓,則能加速退磁過程,具體過程可參考文獻。實驗發現,采用加速退磁技術后大大縮短了退磁時間,提高了反電動勢過零信號檢測的準確性,增強了系統運行的穩定性。采用加速退磁技術前后的無刷直流電機三相端電壓和過零點實驗波形如圖5所示。
3 硬件設計
搭建了基于STM8S208RB的變頻空調控制器的電路,主要包括電源電路、功率驅動電路、過流差分放大電路、過零點檢測電路等(限于篇幅省略STM8S208RB最小系統圖和電源部分)。
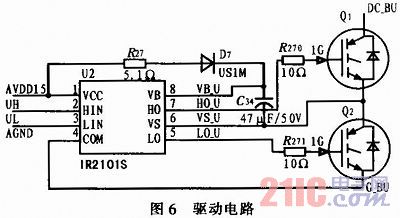
3.1 驅動電路
驅動電路如圖6所示,IR2101是IR公司生產的一款高性價比驅動器,使用方法非常簡單,性價比高,能輸出100-210 mA電流。IR2101驅動器可驅動一組功率管,整個功率電路只需3片即可,這樣不但節約制造成本,而且還提高系統穩定性。
3.2 過流反饋與過流保護電路
電流反饋與過流保護監測電路如圖7所示。母線上的電流通過2毫歐,并通過1 mV358進行差分放大,通過一階濾波后輸人給STM8S的片內AD采樣輸入端;并同時將此電流信號連接到比較器Im2903,用于電機過流保護檢測,當母線電流過大設定的過流保護閾值時,微處理器進入過流保護狀態。

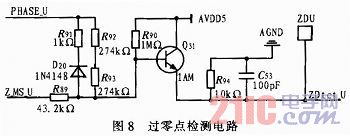
3.3 過零點檢測電路
過零點檢測電路如下圖所示,圖8為U相過零點檢測電路,其中PHASE_U連接電機的U相,Z_MS_U為單片機的GPIO控制信號,ZDtet_U連接STM8S的AD口,三極管Q31起到對AD口過壓保護和射極跟隨的作用,提高輸入阻抗。R91和D20起到對三極管基極加速放電的作用,當PWM“ON”時,Z_MS_U為低電平,R92,R93和R89構成分壓電路,當PWM“OFF”時,Z_MS_U為高阻抗,R89不起作用,電機反電動勢信號直接通過Q31進入AD采樣端。
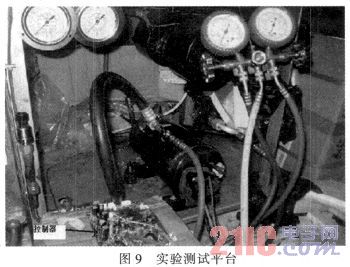
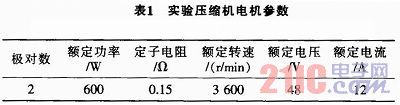
4 實驗環境
一套完整的48 V空調壓縮機系統測試平臺如圖9所示;系統的供電電壓為48 V,無刷直流電機的額定功率為600 W,額定轉速3600轉/分鐘。功率器件采用IR公司的IRFB4310。VDSS=100 V,Rds(on)=5.6 mΩ,Id=140 A(Tc=25°),Id=97 A(Tc=100°)。
5 結論
本系統通過采用H-PWM-L-ON調制方式,利用快速退磁技術完成了無刷直流電機的穩定運行和無失步換相的目標。并通過三段式起動方式,完成無刷直流電機靜態時的起動,實現了反電勢檢測法在無位置傳感器無刷直流電動機控制系統中的應用。實驗結果表明,所使用的過零點檢測方法在壓縮機負載下能夠很好地工作。