
本系列文章的第 9 部分是大家熟悉的電子工程的第 5 章——“保持電容負載穩定性的六種方法”。這六種方法包括:Riso、高增益及 CF、噪聲增益、噪聲增益及CF、輸出引腳補償以及帶雙向反饋的 Riso。我們將在本部分介紹輸出引腳補償。這種保持電容負載穩定性方法不同于輸出運算放大器“緩沖”網絡,輸出運算放大器“緩沖”網絡通常用于功率運算放大器(帶有所有 NPN 輸出級)輸出,其目的是在驅動電容負載時防止意外高頻振蕩。本系列文章的后面章節將詳細介紹“緩沖”網絡的使用情況。
有時,在現實生活中,我們并非總能夠接近運算放大器的 -輸入和/或 +輸入,因此無法在模擬工具欄中使用其他補償方法。我們將會在本部分探討用于發射極跟隨器輸出運算放大器及 CMOS RRO 運算放大器的輸出引腳補償方法。發射極跟隨器應用需要在獨特的 4~20mA 構建塊集成電路上采用一個參考輸出。CMOS RRO 應用涉及一種用于電源反饋的差動放大器。這兩種依范例定義的情況都屬于現實應用。為此,我們可以斷定唯一的保持電容負載穩定性的方法只能是輸出引腳補償。除了一階分析與 TINA Spice 模擬之外,我們還可以
利用“預測”結果來進行實際實施。
雙極性發射極跟隨器:輸出引腳補償
我們的雙極性發射極跟隨器輸出引腳補償實例如圖 9.1 所示。XTR115/XT116 是一種可以將輸入電壓變化轉換成 4~20mA 模擬信號的雙線4~20mA 集成電路。由于 4~20mA 發送器用于驅動長距離線路,因此需要 7.5~36V 的大工作電壓范圍。此外,XTR115/XTR116 配有子穩壓器,可為傳感器調節電路提供 5V 的供電電壓,以及 2.5V(XTR115)或 4.096V(XTR116)的高精度參考電壓。
4~20mA 信號范圍是既定的行業標準,用于工廠(普遍存在 50 或 60Hz 高電壓噪聲)等嘈雜環境中長距離(1 英里或 1.6 公里以上)模擬信號的傳輸。由于該標準是采用電流控制的傳輸,因此使用兩條線路可以避免電壓噪聲耦合。它采用兩條相同的線路來傳輸功率與信號。由于使用的模擬信號范圍規定為 4~20mA,因此其中 4mA 的信號可驅動信號調節電路并觸發兩條線路發送器端的傳感器。功率由接收機提供,而接收機同時還能接收 4~20mA 的模擬信號,該信號已根據傳感器測量的實際參數(如:橋接壓力傳感器發送的壓力)進行了分級。4~20mA 信號在接收機端通常由 A/D 轉換器轉換為1V~5V的電阻器(250 歐姆)電壓。
通常在此類 4~20mA 傳感器發送器中采用微控制器讀取并將線性常數應用到實際傳感器中。微控制器必須是低功耗控制器,以便允許某些電流觸發傳感器,原因是我們的總調節電路電流預算必須低于 4mA。MSP430F2003 提供一種低電壓、低靜態電流微控制器。該微控制器具有一個用于讀取橋接變化的板上 ADC。在微控制器應用了線性常數之后,即與 DAC8832(一款用于生成 XTR115/XTR116 所需模擬輸入電壓的低功耗 DAC)進行通信。DAC8832 由一種零漂移、低功耗、單電源的運算放大器(OPA333)進行緩沖。由于我們的系統是一套完美的系統,因此可驅動任何器件,其中包括XTR115/XTR116 的精確VREF 引腳。我們之所以選擇 XTR115 (2.5V VREF) 是因為 MSP430F2003 只能在 1.8V~3.3V 范圍內工作。目前 MSP4302003 的板上 ADC 以及 DAC8832 將采用 XTR115 高精度 2.5V 參考電壓。我們的典型總調節電路靜態電流為 562uA,可以保留 3.4mA 的電流用于觸發橋接傳感器。目前我們唯一的難題是需要添加許多本地旁路電容器,以便在 XTR115 的 VREF 引腳驅動的眾多集成電路附近實現良好的高頻旁路。XTR115 VREF 引腳是否穩定?

圖 9.1:4-20mA 橋接傳感器應用
圖 9.2 詳細說明了 4~20mA 橋接傳感器信號調節器應用中采用的集成電路的主要規格。

圖 9.2:4~20mA 調節電路 IC 主要規格
XTR115 VREF 引腳是圖 9.3 所示的發射極跟隨器輸出拓撲運算放大器的輸出引腳。

圖 9.3:XTR115 VREF 引腳:發射極跟隨器輸出運算放大器
圖 9.4 顯示了 XTR11 VREF 引腳的等效示意圖。VREF是緩沖的 1.25V 帶隙參考電壓,經過 2 倍放大后產生 XTR115 2.5V 參考輸出電壓。發射極跟隨器輸出級的 Ro 為 4.7k 歐姆。我們是從工廠獲得上述信息、RF與 RI 值以及 U1 的 Aol 曲線的,因為 XTR115 的產品說明書并未詳細介紹所有資料。我們的總電容負載 CL 為 500nF。Ro 與 CL 互動,形成 XTR115 VREF 運算放大器的 Aol 修正曲線中的第二個極,即 fpu1。請注意:我們無法接入 U1 的 - 輸入或 + 輸入,因為它是 XTR115 的內部器件。所以我們只能使用一個引腳來補償放大器穩定性(輸出引腳:VREF)。另外,我們希望使 VREF 引腳保持極高的精度,因此在 CL 前面將該引腳與任何電阻串聯均不是理想的解決方案。

圖 9.4:XTR115 VREF 引腳:電容負載等效示意圖
我們將采用圖 9.5 所示的 TINA Spice 電路檢驗運算放大器的 Aol 曲線以及由于 CL 導致的 Aol 修正曲線。我們通過 LT(相關 DC 頻率時短路、相關 AC 頻率時開路)以及 CT(相關 DC 頻率時開路、相關 AC 頻率時短路)使用我們的 Spice AC 分析方法。
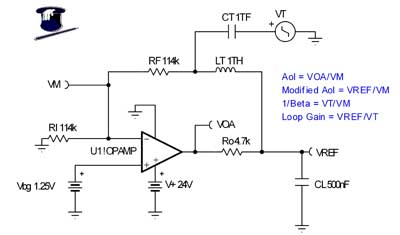
圖9.5:AC 穩定性檢查:原始電路
圖 9.6 顯示了運算放大器 Aol 曲線以及由于 CL 導致的 Aol 修正曲線。在 fcl1 可以看到,就我們的一階穩定性標準而言不穩定的每十倍頻程 40db 的閉合速率。根據預測,CL 導致的 fpu1 為 67.73Hz,其從檢測的角度來看在本圖中是正確的。

圖 9.6:Aol 與修正 Aol:原始電路
我們檢查了圖 9.7 所示的環路增益圖,并可以證實了當相位裕度在-fcl1 位置幾乎為零時(0.442 度)對穩定性的擔心。

圖 9.7:環路增益圖:原始電路
我們在圖 9.8 進行瞬態穩定性測試 ,即在附帶 500nF CL 的閉環電路中注入一個較小的方形波。

圖 9.8:瞬態穩定性測試:原始電路
圖 9.9 中的瞬態穩定性圖再次表明我們的電路并不穩定。我們的運算放大器輸出在響應小步階變化時從未穩定過。請注意:VOA 以大約 2.5V 幅度變化,表明我們的 DC 電平對于本電路而言是正確的。

圖 9.9:瞬態穩定性圖:原始電路
我們在圖 9.10 中明確了用于雙極性發射極跟隨器輸出放大器的輸出引腳補償方法。首先我們用 fpu1 來修正運算放大器原始 Aol 修正曲線,fpu1 是由于 Ro 與 CL 產生的極點(參見曲線 1)。一旦創建了該曲線,我們就可以繪制從曲線 1 與 0dB 交叉點開始的第二條曲線(曲線 2)。從上述起點我們按照每十倍頻程 -20dB 的斜率繪制出比 fp1(運算放大器 Aol 低頻極點)高一個十倍頻程的點,我們在此處把斜率修改到每十倍頻程 -40dB。在頻率為 fp1 時我們將斜率改回每十倍頻程 -20dB,直到與運算放大器的 DC Aol 值相交叉。上述建議的 Aol 修正曲線(曲線 2)滿足我們所有經驗標準——通過使極點與零點相互保持在一個十倍頻程之內,從而保持環路增益相位在環路增益帶寬范圍不低于 45 度。另外,我們建議的 Aol 修正曲線(曲線 2)還可滿足在 fcl2 閉合速率為每十倍頻程 20dB 的一階穩定性標準。

圖 9.10:輸出引腳補償:雙極性發射極跟隨器
圖 9.11 說明了我們如何利用 RCO 及 CCO 獲得建議的 Aol 修正曲線。另外我們還需要考慮另外一個極點,因為 CCO 在某些高頻情況下會短路,而且 CL 與 RCO 將形成一個附加高頻極點。即使此極點在 fcl2 之外出現,我們的情況仍然正常。

圖 9.11:AC 穩定性檢查:輸出引腳補償
由于知道 Ro 與 CL,因此可以利用圖 9.12 所示公式以及圖 9.10(曲線 2)建議的 Aol 修正曲線計算出補償分量 RCO 與 CCO 以及由 RCO 與 CL 形成的超高頻極點。
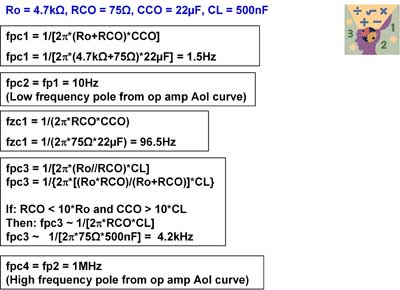
圖 9.12:輸出引腳補償公式:雙極性發射極跟隨器
我們在圖 9.13 中采用輸出引腳補償方法繪出預測曲線。由于 XTR115 之內的閉環運算放大器以 2 倍增益運行(6dB),閉環 VREF/VIN 曲線始終保持平直,直到在 fcl2 位置與 Aol 修正相交,由于環路增益已經等于零,因此此后該曲線隨 Aol 修正曲線一直降低。

圖 9.13:最終預測曲線:輸出引腳補償
圖 9.14 是在采用圖 9.11 所示電路的情況下,我們的 AC 穩定性分析 TINA Spice 模擬結果。在 fcl2 位置時可以看到每十倍頻程 20dB 的閉合速率,但是我們應當通過相位圖了解詳細情況。

圖 9.14:Aol 與 Aol 修正:輸出引腳補償
圖 9.15 所示的環路增益圖證明我們的輸出引腳補償方法可以產生穩定的電路。在 fcl2 位置時相位裕度為 40度,相位在環路增益帶寬范圍內不會過多低于 45 度。如果需要,我們可以細微調節輸出引腳補償值,以便在 fcl2 獲得更高的相位裕度。

圖9.15:環路增益:輸出引腳補償
圖9.16中的電路采用瞬態穩定性測試來檢查采用了輸出引腳補償的最終電路。

圖9.16:瞬態穩定性測試:輸出引腳補償
圖 9.17 所示的瞬態穩定性測試結果證明了我們的環路增益檢查,即輸出引腳補償可以產生穩定的電路。一個較低的過沖以及無過度振鈴的一個下沖看起來接近典型的、45 度相位裕度補償電路。

圖9.17:瞬態穩定性圖:輸出引腳補償
圖 9.18 所示的 TINA Spice 電路使我們能夠檢查最終的 VREF/VIN 閉環 AC 響應是否符合在圖 9.13 中的預測。
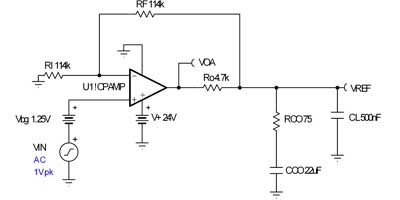
圖 9.18:VREF/VIN AC 電路:輸出引腳補償
根據圖 9.13,我們估計 fcl2 約為 5kHz,因此預計對于 VREF/VIN 而言在該點會出現陡然降低。在圖 9.19 中,我們可以看出閉環 AC 響應符合預測結果。在 AC 閉環響應中存在輕微峰化現象,不過其對于本應用不會造成影響。同樣,如果我們希望減少這種峰化現象,就需要再次利用我們的輸出引腳補償把 fcl2 點的相位裕度提高到 40 度以上。

圖9.19:VREF/VIN AC響應:輸出引腳補償