
1 引 言
本文介紹一種應用軟開關技術的感應加熱逆變電源控制器。運用軟開關技術,功率器件在電流過零點時進行切換,電流控制器采用離散時間狀態。在電路參數有規律的采樣中,輸出電流可以離散化,得到離散數學模型。針對感應加熱電源逆變控制器,提出了一種準滑模控制策略。該控制方案的優點有:設計的系統控制簡單,容易滿足實際的工業應用,可進行數字化處理;設計的系統控制對逆變器參數變化不敏感;控制系統可以實現全范圍的系統操作。
采用滑模控制方式的逆變器與傳統控制方式相比,具有良好的動態特性、魯棒性以及在電源和負載大范圍變化時能保證系統穩定性的優點。滑模控制方式要求全狀態變量反饋,且需要相應的基準參考量,增加電路設計的復雜性,所以一般的滑模控制方式大多停留在理論分析和仿真階段。
滑模控制與常規控制的根本區別在于控制的不連續性,即一種使系統“結構”隨時間變化的開關特性。由于功率變換器中開關元件的存在,使滑模變結構控制理論得到廣泛應用。

2 負載回路的數學模型
圖1為串聯諧振感應加熱系統電路結構圖,其中負載回路由電容Cc、感抗L和電阻R串聯形成振蕩回路。假設直流電壓Vdc連續,C遠大于振蕩電容Cc,變壓器變比N為1。
假定初始電流為零,負載電路上電壓為VS,則輸出電流i0和電容電壓vc的時域方程為:
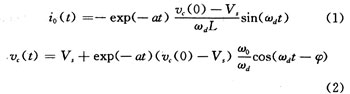
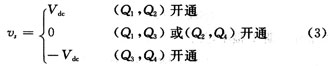
由于采用軟開關技術,系統的開關頻率等于振蕩頻率。串聯諧振電路的輸入電壓vs可由以下開關狀態決定:
為方便地表述逆變器運行狀態,引入一個新的離散變量M(k)如下;

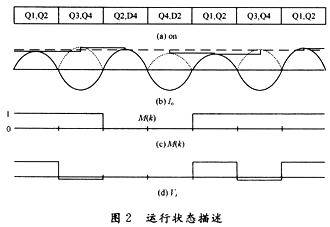
圖2為運行狀態描述,(a)為開關導通狀態;(b)為輸出電流io,整流電流∣io∣,參考電流Iref,每半周期電流峰值Io;(c)為運行狀態(1:輸入功率模式,0:自由衰減模式);(d)變壓器二次側電壓Vs。
于是,式(3)可改寫成為:
![]()
該式表明,運行狀態一旦確定,Vs的幅值為Udc,符號由i0(t)決定,式(5)中T=π/ωd是半個振蕩周期,每半個振蕩周期的輸出電流峰值絕對值Io和電容電壓Vc可用離散變量表示。由于Q遠大于1,可認為;Vc比Io滯后π/2,可得差分方程:
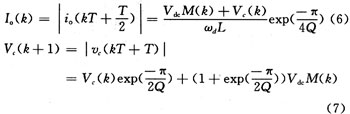
電容電壓Vc離散狀態的動態峰值由式(7)自身表示。將式(7)代入式(6),就可得負載回路的離散電流狀態方程:

M=1電路工作在輸入功率模式下,諧振環節電流持續增加;
M=0電路工作在自由衰減模式下,諧振環節電流不斷減小;
M=-1電路工作在再生功率模式下,諧振環節電流較自由衰減模式減小更快;
本文只使用前2種工作模式,即在功率輸入與自由衰減2種狀態運行,變量u(k+1)表示電流控制強度,實際取值為{1,0.5,0}。根據以上分析得到的離散電流動態模型,可分析電流控制器設計方案。
3 滑模變結構電流控制策略
本節討論一種應用比例積分滑模的電流控制技術。目的是使在穩態下輸出電流峰值的絕對值Io有一個較小的電流偏移量時,能夠較為準確地跟隨于期望的參考電流Iref,在階躍輸入時可以有快速的瞬態響應和較小的超調量。
引入滑模變結構控制理論(the theory of VariableStructure Control,VSC)。所謂滑模變結構控制是:當系統狀態運動到某特定點,使得由狀態決定的切換函數值發生變化,系統運動方程由一種形式轉換為另一種形式,即結構發生變化。在不斷的結構變化中,系統以滑模形式運動至平衡點,由于逆變器內在的開關原理,使其非常適合滑模控制。它的突出優點是滑動模態可以具有對系統攝動、不確定性以及干擾的“完全自適應性”。由于電容和電感變化較小,可忽略其對滑模面的影響,故滑模控制策略有較好的適用性。電流控制的離散滑動模型可由式(8)表述。
滑模切換函數的選取影響系統的動態品質,本文采用電流誤差積分滑模面,切換函數可表述如下:
![]()
S為離散滑模切換函數,Ki為積分增益,Ie=Iref-Io為電流誤差。
電流控制器的控制律為:
![]()
感應加熱系統電路參數L,C和R已定,則滑模控制系統響應完全由Ki決定。采樣保持器檢測輸出電流峰值,并保存1個振蕩周期,與參考信號比較并產生誤差信號。電流控制器的輸出決定下一個運行狀態,當過零檢測器檢測到過零信號時就切換開關狀態。從滑模控制系統穩定性、快速響應性、較好的魯棒性和負載變化不敏感性等方面考慮,可以用較大的增益Ki來快速補償偏移量。增益Ki設計的恰當,就能有效消除基頻偏移量,得到穩定的輸出電流。
3.1 積分器增益Ki的確定
對于離散準滑模系統,準確到達切換面常是不可能的,這里假設:
考慮到當Iref=Imax或Iref=0時為電流控制的極限值,且u(k+1)的值為{1,0.5,0),可確定增益值范圍:
![]()
3.2 切換面吸引性分析
系統進入準滑動模態的到達條件:
![]()
要保證實現滑模控制,必須使比例積分滑模控制切換面具有可到達性。考慮u(k)的控制作用,由圖2可以看出,當輸出電流連續2個T小于參考電流值Iref時,u(k+1)的值為1,系統處于功率輸出狀態,使負載電流峰值上升;當大于Iref兩個T時,u(k+1)的值為0,系統就切換為自由振蕩狀態;由于負載消耗,電流峰值必然會小于Iref,通過u(k+1)的計算,系統又切換至功率輸出狀態。由上述分析可知,狀態空間中任意工作點都可在控制律的作用下到達式(14)確定的切換面,即切換面具有可到達性。
3.3 穩定性分析
定義Lyapunov函數:

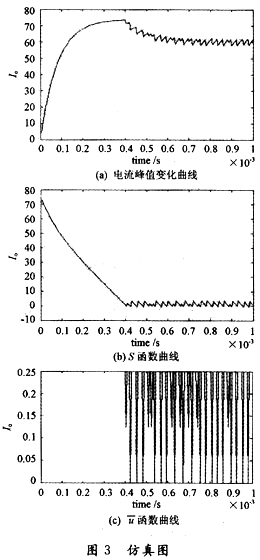
4 仿真結果分析
本文采用Matlab語言,編寫M函數對上述模型進行仿真。參數選取如下:
R=0.2 Ω,L=12.0μH,Cc=0.2μF
計算可知電路諧振頻率為100 kHz;增益Ki的值取為10000。設參考電流為60 A,初始電流值為0,N=4,則如圖3所示。
5 結語
針對串聯諧振感應加熱電源逆變器,建立逆變器的負載回路離散數學模型,分析比例積分滑模控制電流控制器切換面參數的選擇條件、可達性和滑模存在性及穩定性;選擇適當的增益后,可使滑模控制對輸出負載變化具有良好的快速性和魯棒性。根據此模型,使基于DSP控制策略容易實現。