
摘 要: TMS320DM270異質多處理器" title="多處理器">多處理器由ARM和DSP兩種微處理器組成。以其為基礎,設計了DSP端的數據流核心和ARM端的DSP管理者。
關鍵詞: 多處理器 ARM DSP 數據流
異質多處理器系統(Heterogeneous Multiprocessor)是將兩種以上不同工作性質的處理器核心整合為一的處理器系統。它通常包含了一般用途處理器(General Purpose Processor)和特殊用途處理器(Specific Purpose Processor)。隨著片上系統SoC(System on Chip)及相關技術的成熟,已經可以將不同的處理器整合到一個芯片里,成為多處理器芯片。以多媒體應用為例,比較著名的異質多處理芯片有德州儀器公司的TMS320DSC25、TMS320DM270和TMS320DM320。這些芯片都是由ARM微核心和DSP微核心組成。傳統的多處理器系統架構(如Intel SMP架構)是由多個處理芯片通過外部總線匯接而成,而多處理器片上系統架構是在單一芯片上包含了多個處理器核心。它能減少系統的功耗并使整個系統發揮最大的運算效能。
1 硬件平臺
本設計采用的硬件平臺是德州儀器公司的TMS320DM270,它由兩個微處理器核心ARM7TDMI[2]和TMS320C5409[3]組成。采用主從式架構,前者為主動端,后者為被動端。ARM7TDMI是32位的一般用途處理器,負責DM270系統的整體運作和所有周邊設備的控制。TMS320C5409為16位的數字信號處理器,主要負責多媒體信號處理,如音視頻的編解碼運算等。ARM可以經由DSP控制器重置或喚醒,還可對DSP發出不可屏蔽式的中斷(Non-Masked Interrupt)。
雙處理器之間必須有良好的通信和數據交換機制,才能使系統在多進程環境下有效合作。在DM270中,ARM端的DSP控制器控制數據傳輸,DSP端通過HPI[3](Host Post Interface)與ARM處理器溝通。兩個微處理器使用HPIB(Host Port Interface Bridge)相互連接。ARM和DSP可向對方發出硬件中斷,同時它們之間存在一段共享存儲區。通過共享存儲區映射機制和中斷的搭配,雙方可以傳輸信息和數據,并且可以在共享存儲區存取雙方共同定義的指令,使兩端根據指令進行對應的動作。
2 ARM端的DSP管理者
為配合DSP的工作,在ARM端微核心(Micro Kernel)中設計了一個伺服進程,它負責ARM與DSP的溝通及協調運行。該進程稱為DSP管理者(DSP Manager),如圖1所示。

ARM端的進程并不知道DSP處理器的存在,只知道DSP管理者在運行。當ARM端的進程需要使用DSP進程所提供的數據處理" title="數據處理">數據處理服務時,只需向DSP管理者提出請求。DSP端的進程也不知道ARM處理器的存在,DSP管理者把ARM端的請求存放在共享存儲區,由DSP的數據流核心讀取這些請求,并交給相應的DSP進程。當請求被DSP進程接收后,DSP管理者還要負責把提出請求的ARM端進程的數據存放在共享存儲區,以便DSP端進程的讀取和處理。因此ARM與DSP溝通的效能取決于DSP管理者的執行效能。
DSP管理者接收ARM端進程的數據處理請求。請求信息應該包括提出請求的ARM端進程的ID、DSP端服務進程的ID、數據處理服務類型的ID以及相關參數。同時DSP管理者把這些請求信息打包封裝為DSP端系統能識別的內容格式,再通過共享存儲區交給DSP端的數據流核心。
由于真正維持系統運作的是ARM端系統,DSP只是附屬的處理系統,所以ARM端的DSP管理者可以在系統正常工作的情況下更換DSP系統,以支持不同的DSP應用。
3 DSP端的數據流核心
DSP端的系統采用數據流核心(Dataflow Kernel)架構。傳統系統核心" title="系統核心">系統核心架構中的進程切換由Timer Tick決定,但數據流核心中的進程卻不受Timer Tick的影響,它們以數據驅動(Data Driven)的方式工作。
在DSP端的核心運行著多個不同類型的數據處理服務進程,這些進程在DSP啟動時都被設為阻塞態(Sleep)。因為此時沒有任何數據可以用來驅動DSP服務進程的執行。當ARM端開始傳送數據處理請求到DSP端時,數據流核心會根據這些請求找到對應的DSP服務進程,并使其進入執行態(Busy)。當該服務進程的數據處理任務完成后,其返回結果可能是新的數據處理請求,該請求同樣也可以進入數據流核心,驅動其他服務進程的執行。所以整個核心的運行是根據數據流(ARM端的數據和DSP進程自己產生的數據)的動向決定的。與基于Timer Tick的傳統系統核心相比,只要某一服務進程不斷地接收數據處理請求,并且所需的數據不斷到達,該進程就可以一直擁有CPU的使用權,而無須進行時間片方式的進程切換,從而減少了系統資源的浪費,提高了DSP的處理效能。

DSP端的進程有執行和阻塞兩種狀態。進程的狀態轉移如圖2所示。當CPU使用權切換給某個進程時,該進程的狀態將被核心設定為Busy并開始處理數據。當數據處理完后,數據流核心從數據請求隊列DRQ(Data Request Queue)中取出下一個請求。如果請求信息中指定的DSP服務進程與目前進程相同,則該進程的狀態依舊為Busy,否則核心便將目前進程的狀態設定為Sleep,同時開始進程切換,將請求信息中所指定的服務進程設定為Busy。
3.1 進程隊列狀態寄存器" title="狀態寄存器">狀態寄存器
ARM端系統和DSP端系統在共享存儲區共同定義了16位的進程隊列狀態寄存器(Process Queue Status Register),每一位代表DSP端一個進程的狀態,所以DSP端最多有16個數據處理服務進程。若DSP端的數據流核心將寄存器的某一位設為0,則表示與該位對應的DSP進程有能力處理新的數據處理請求;若設為1,則表示與該位對應的DSP進程沒有能力處理新的請求。
DSP管理者通過查看該寄存器,可以知道DSP端的某些進程已不能接收新的數據處理請求,它就會使ARM端的相關進程停止向這些DSP進程發出請求。這樣可以充分利用DSP的資源,降低DSP端的系統負擔。
3.2 數據流核心的進程調度策略
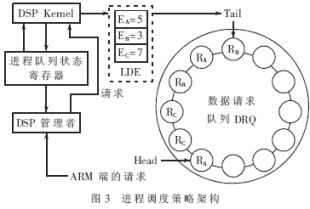
核心中的進程調度策略是根據數據流架構上進程運行狀態變化的規律設計的。其工作方式是將ARM端對DSP端的數據處理請求利用環行隊列(Circular Queue)的架構以FIFO的方式排序,并存入DRQ中。該策略的特點是DSP端的每一個進程都預先指定最多可以擁有DRQ空間的數目,等級越高的進程擁有DRQ使用空間就越多,證明其可以處理更多的數據請求。該策略將傳統系統核心中進程優先級(Priority)的概念轉化為進程可以處理數據請求的多少。進程等級越高,能處理的數據請求也越多,同時占用CPU的執行時間也較長。LDE(Local Data Element)是DSP端每一個進程都有的參數,它表示DSP進程在執行過程中還可以接收多少個數據處理請求。LDE的初始值由系統定義。整個DRQ空間的大小由所有DSP進程的LDE預設最大值的總和決定。
當DSP端的數據流核心取得ARM端的數據處理請求時,根據請求找到指定的DSP端進程,把該進程的LDE減1,然后進行相應的數據處理。如果LDE被減至0,則DSP端數據流核心把該DSP進程在進程隊列狀態寄存器中所對應的狀態位設為1,以通知DSP管理者該進程不能再接收新的請求,分配給該進程的所有DRQ 空間都已被使用。此后,隨著DRQ中的數據請求逐漸被處理,使得該進程的DRQ空間再出現剩余時,數據流核心會把進程隊列狀態寄存器中所對應的狀態位設為0,通知DSP管理者可以再次向該DSP進程發送數據處理請求。
如圖3所示,DRQ是環行隊列結構,存儲所有的請求信息。DRQ有兩個指針:Tail指向DRQ沒有被使用的空間;Head指向DRQ中將被處理的請求。LDE有三個元素EA、EB、EC,代表DSP的進程A、B、C分別可使用的DRQ個數。數據流核心接收請求RB后,調度算法將EB減1,并且通過Tail指針將請求RB加入DRQ中。當系統需要處理請求時,調度算法由Head指針取出請求并交由適當的DSP進程處理。
4 共享存儲區管理
本設計將DM270系統平臺中的一段32KB大小的存儲區作為ARM和DSP的共享存儲區。該存儲區由DSP管理者負責管理。由于TMS320C5409的存儲單位是字節,所以規定它所訪問的共享存儲區地址為0x8000~0xBFFF;而ARM7TDMI的存儲單位是字,所以規定它能訪問的共享存儲區地址為0x50000~0x57FFF,共享存儲區分配如圖4所示。共享存儲區分為32個存儲塊" title="存儲塊">存儲塊,每塊大小為1 024B。前兩個字節為共享存儲塊的狀態標志位,其值為0代表此存儲塊閑置,1代表此存儲塊已被使用。存儲塊中剩下的1 022B用來存放數據。DSP管理者將所有ARM端需要DSP處理的數據都存儲到這32個存儲塊上。
當32個存儲塊全部被使用或者數據處理請求中所指定的DSP進程的LDE為0時,DSP管理者向ARM端提出該請求的進程阻塞,防止因不斷地提出請求而造成系統資源的浪費。當所指定的DSP進程數據處理結束后,DSP端的數據流核心將該進程阻塞,并對DRQ空間和進程隊列狀態寄存器作相應調整,然后主動釋放該DSP進程使用的共享存儲塊,同時向ARM端發出中斷信號。DSP管理者接收到此中斷信號后,根據進程隊列狀態寄存器判斷出請求所指定的DSP進程已經可以開始處理數據了,讓剛才在ARM端被阻塞的進程繼續運行,并把數據寫入共享存儲塊,以便DSP進程讀取和處理。
當存在閑置的存儲塊并且數據處理請求所指定的DSP進程的LDE不為0時,DSP管理者可直接將ARM端進程的數據寫到共享存儲塊,以便相應的DSP進程讀取和處理。
5 DSP端系統的熱抽換
DSP系統的更換技術對多媒體應用而言非常重要。如果DSP端需要播放不同格式的影片,則必須把整個DSP端系統更換以支持不同格式的解碼器。因此在系統設計中使用了熱抽換技術。傳統熱抽換技術的定義是動態地把系統中的核心層部分更換,在不重新開機的情況下,進程還可以正常工作。而本設計的熱抽換是更換整個DSP端的系統,同時維持ARM端進程的正常工作。為了實現熱抽換,必須在某段靜態存儲區存放多個版本的DSP系統程序。本設計中,這些程序被存放到DM270的Flash Memory中,ARM端的檔案系統負責維護和管理這部分內容。
DSP系統的熱抽換過程如下:①DSP端要把那些由于沒有進行數據處理而陷入阻塞的DSP進程全部釋放,否則當DSP端系統更新后,這些進程會因為永遠不能再得到相應的數據,而造成永久阻塞,形成系統資源浪費;②ARM端的DSP管理者會清空所有的共享存儲區,同時阻塞ARM端的所有用戶進程;③ARM端的檔案系統將從Flash Memory中讀取所需的DSP系統檔案并將它加載到DSP的內存;④DSP端系統啟動,DSP管理者喚醒ARM端所有被阻塞的進程,為更新后的DSP系統服務。
ARM端的系統負責整個系統的正常運行,同時將數據處理請求和相關數據傳送給DSP,而不管這些數據如何被DSP使用;DSP端只負責數據的處理,而不管數據的來源和用途。這種架構關系保證了DSP系統的熱抽換是安全可靠的,不會破壞系統的正常運行。
本文以DM270平臺為基礎,設計了DSP端的數據流核心和ARM端的DSP管理者。與傳統的、基于時間片的多進程系統核心相比,數據流核心的進程是靠數據驅動的方式工作的。它能有效地減少進程的切換,節約系統資源,使DSP可以更加專注于多媒體數據的處理。
參考文獻
1 Singh K.Design and Evaluation of an Embedded Real-time Micro-Kernel.Virginia Polytechnic Institute and State Univer-sity,2002
2 Furber S.ARM System-on-Chip Architecture.United states:Addison Wesley professional,2000
3 孫宗瀛,謝鴻琳.TMS320C5XDSP原理設計與應用.北京:清華大學出版社,2002
4 沈建華.ARM嵌入式系統開發:軟件設計與優化.北京:北京航空航天大學出版社,2005
5 陳曙暉,王繼進.嵌入式系統——體系結構、編程與設計.北京:清華大學出版社,2005