0 引 言
全球定位系統(Global Positioning System,GPS)是美國國防部于1973年提出,歷時20年,耗資200多億美元建立起來的,具有在海、陸、空進行全方位實時三維導航與定位能力的新一代衛星導航與定位系統。GPS能為用戶提供連續實時、高精度的三維位置、三維速度和時間基準,是一種全球性、全天候、連續的衛星無線電導航系統。在目前世界上所有的衛星定位系統中,GPS是技術最成熟,應用最為廣泛的。
在遠程目標定位中,需要將利用GPS技術獲得的遠程目標的定位信息發送到監控中心。這可利用無線電臺進行發送,但是該方法容易受到干擾而且還受到電臺通信距離的限制。隨著移動通信的發展和GSM網絡的廣泛覆蓋,GSM短消息業務也得到廣泛應用,利用短消息服務來傳輸GPS定位數據是具有優勢的。GSM網絡容量大,通信盲區少,利用該方法不僅可以克服傳輸距離的限制,而且相當方便、可靠,費用也十分低廉。結合GSM網絡作為數據傳輸方式的各種優點和GPS這一成熟的定位技術,本文研究并實現了一種利用較少的資源就可實現的基于虛擬串口的GPS/GSM遠程定位技術。
1 系統架構
系統構成框圖如圖1所示。在遠程目標端,單片機通過GPS模塊獲取有用的信息,如經緯度、時間、速度等信息,定時的以短消息的形式操控GSM短消息模塊發送定位數據給監控中心。在監控中心部分,采用一個GSM模塊與PC機通信,編寫一個PC上的軟件實現收發短消息、撥打電話、保存短消息等功能,并顯示出遠程目標定位信息。同時,通過撥打遠程目標處TC35i模塊的電話可實現系統的一些擴展功能。

1.1 GPS模塊
GPS模塊采用的是Navman公司的Jupiter 21OEM板,它具有12通道,體積小、重量輕、功耗低;定位迅速準確,抗干擾性能突出;操作簡便、易于開發,可通過串口與PC機進行通訊。可以根據通信的波特率選擇輸出NMEA-0183語句格式或者SIRF二進制格式的定位信息,默認情況下輸出為NMEA-0183語句格式。該模塊還具有1 PPS秒脈沖輸出,且精度優于1μs,在本系統設計中用對1 PPS秒脈沖計數的方法很好地實現了收發短信的定時。
1.2 GSM短消息模塊
GSM短消息模塊采用的是SIEMENS公司的TC35i模塊,這是一個支持中文短消息的工業級GSM模塊,工作在EGSM 900和GSM 1800雙頻段,電源范圍為3.3~5.5 V,可傳輸語音和數據信息,可以利用AT命令通過接口電路對其進行控制。TC35i模塊支持以TEXT模式和PDU模式發送短消息,使用TEXT模式發送短消息代碼簡單,容易實現,但不能收發中文短信,而PDU格式實現較復雜,但可以收發中文短信。系統設計中處于簡單且能滿足系統需要考慮,采用的TEXT 模式收發短消息。
1.3 主控單元
主控單元采用AT89S52單片機作為控制器,單片機通過串口與GPS模塊以及GSM模塊進行通信。在此需要兩個串口,而AT89S52單片機本身只有一個串口,常規的解決方法是采用具有雙串口的單片機或者ARM等控制器,或者通過硬件來擴展串口。前者會使系統的硬件成本大大提高,而后者不僅會增加系統的成本,還會增大系統硬件的體積。本文采取的解決辦法是,AT89S52單片機本身的串口用于跟GPS模塊進行通信,而利用I/O口P1.4和P3.2編程實現一個虛擬串口與TC35i模塊進行通信。由于單片機內部定時/計數器只能實現較小時間的定時,所以巧妙利用了單片機的T2定時/計數器(P1.0)對 Jupiter 21OEM板的1PPS秒脈沖輸出進行計數方便地實現5 min定時,用于收發短信所需的定時。該部分還擴展了報警電路和控制開關通斷等功能電路,這是由監控中心通過撥打遠程目標端的電話來控制的。同時,還保留了單片機的剩余I/O口用于系統的進一步擴充。
2 系統軟件設計
2.1 單片機部分軟件設計
單片機部分的程序流程圖如圖2所示。該部分程序采用C語言編程實現,主要包括定位信息的提取、虛擬串口通信以及短消息的發送三個部分。

2.1.1 定位信息的提取
單片機采用4 800 b/s波特率與GPS模塊進行異步串行通訊,從GPS模塊輸出的是NMEA-0183語句格式的數據。該語句格式的數據以“$”開頭,包括$GPRMC,$GPGGA,$GPGSV,$GPVTG,$G-PGSA,$GPGLL等語句。系統設計中只從中提取出$GPRMC語句,再進一步提取出里面包含的經緯度、速度、時間等信息,已經可以滿足系統的需求。該部分的軟件流程圖如圖3所示。
2.1.2 虛擬串口
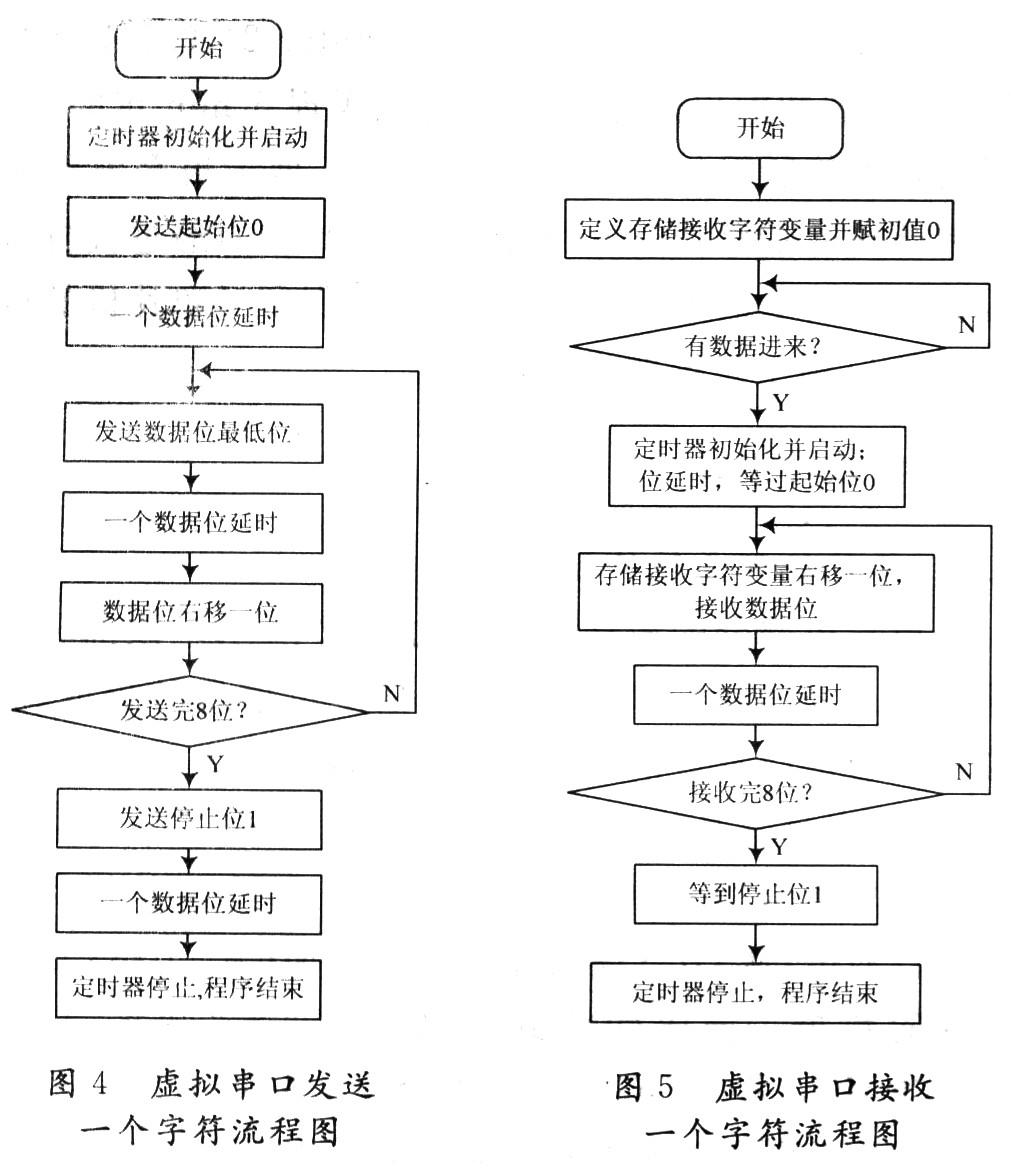
單片機與GSM模塊之間通過虛擬串口進行通信,以解決AT89S52單片機固有串口不足的問題,通信波特率取為9 600 b/s。虛擬串口就是利用單片機I/O編程實現一個串口的功能,這樣就以較少的資源實現了系統的功能,克服了傳統的采用具有雙串口的控制器或者利用硬件進行串口擴展的方法其成本高、體積大的缺點。程序中采用定時器工作于方式2進行一個數據位傳輸時間的定時,用于嚴格控制一個數據位的傳輸時間。單片機采用 11.059 2 MHz晶振,這樣定時器的初值為256-(1 000 000/9 600)/(12/11.059 2)=160,即十六進制的0xA0。實驗結果證明,采用該方法進行串口通訊,數據傳輸穩定、可靠。采用虛擬串口發送、接收一個字符的程序流程圖分別如圖 4,圖5所示。
2.1.3 發送短消息
主要是由單片機根據發送短消息的特定步驟,采用AT命令控制GSM模塊發送短消息,是系統設計中最重要的內容之一。該部分程序設計中,由于會涉及到單片機與GSM模塊的多次交互過程,而GSM模塊響應較單片機來的慢,特別是涉及到FLASH或SIM卡的操作及網絡的交互時,必須要考慮到GSM模塊的響應時間問題。系統中采用TEXT模式發送短消息,步驟如下:
1.設置短信中心號碼:AT+CSCA=+8613500591500
2.設置短信發送模式:AT+CMGF=1
3.設置TEXT模式參數:AT+CSMP=17,167,0,0
4.設置使用的字符集:AT+CSCS=GSM
5.輸入目標號碼:AT+CMGS=13599071***
6.輸入短信內容再輸人
2.2 監控中心軟件設計
至此,英文短信發送成功,此過程中若模塊回復出現ERROR則短信發送不成功。以上步驟1,3,4經設置后無需再設置,步驟2在模塊斷電時需重設,步驟 5,6在每次發送短消息時都要重復進行。在監控中心的PC機上采用VB結合ACCESS數據庫設計一個監控軟件,該軟件通過串口與GSM模塊進行通信,獲取遠程目標的定位信息,經過進一步處理后顯示出來。由于電子地圖制作復雜、價格較貴,所以本系統示意性的利用由Google Earth軟件上截圖出來的圖片作為電子地圖,用于直觀地顯示出遠程目標的具體位置。ACCESS數據庫用于保存收發短消息的內容,該軟件還具有撥打電話等功能。
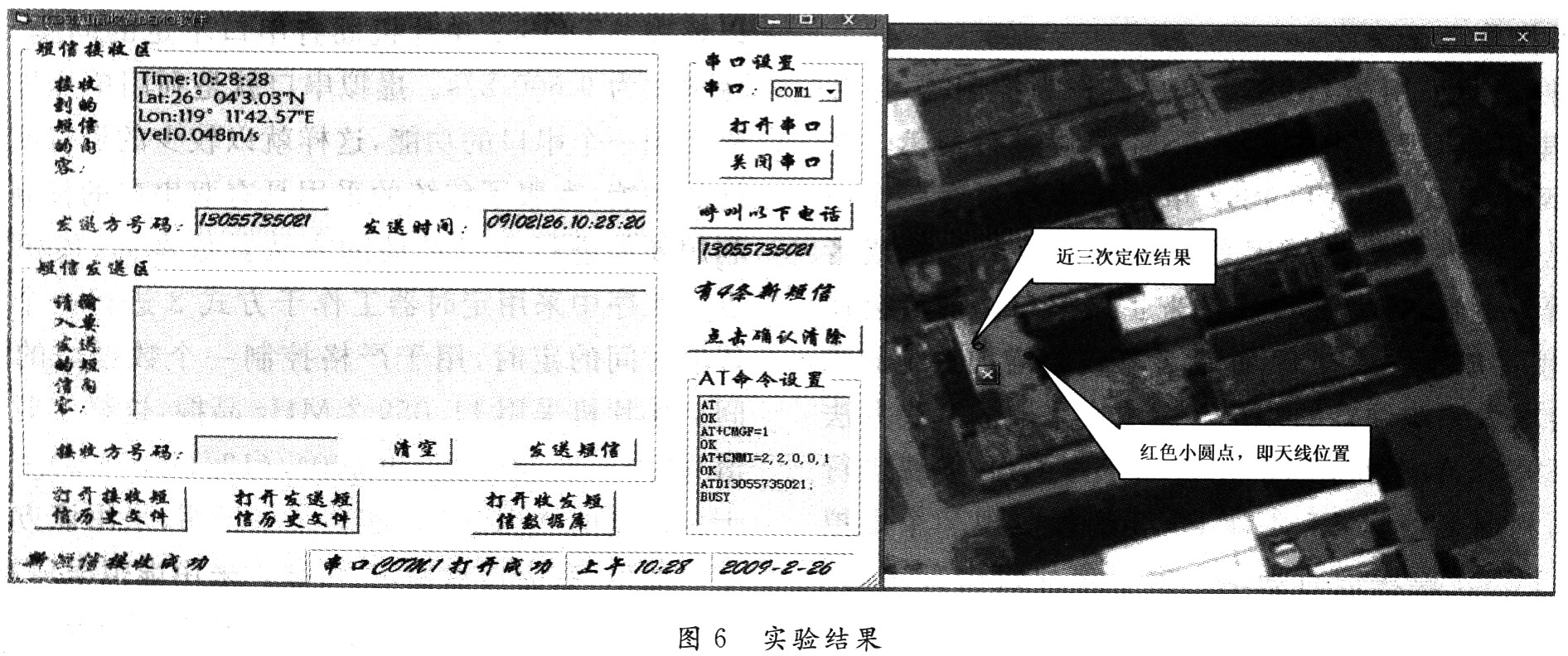
3 實驗結果及分析
利用該軟件進行實驗得到的結果如圖6所示。圖中左半部分是軟件的實現界面,右半部分是以GoogleEarth軟件截圖出來的圖片作為虛擬的電子地圖來示意性的說明問題。實驗中,GPS天線置于福州大學旗山校區電氣學院樓頂,監控中心位于電氣學院南303實驗室。由圖中左半部分可以看到目標最近一次的定位信息:定位時間:10:28:28;緯度:26°04'3.03"N;經度:119°11'42.57"E;速度:0.048 m/s。右半部分圖中的紅、綠、藍小圈圈代表近三次實驗獲得的定位位置結果(在地圖上幾乎重合,為說明位置在圖中進行引出標注),紅色小圓點代表天線的真實位置(在圖中也進行引出標注說明),Google Earth軟件中的地標,用GoogleEarth軟件的測距工具測得實驗結果與天線真實位置的誤差約為12 m,這主要由GPS模塊的定位精度所決定。
由實驗結果可以看出,定位位置結果基本一致,但經緯度、速度存在很小的零漂移,這是正常的,零漂移的大小取決于GPS模塊的性能。經過長期實驗證實,系統穩定、可靠,定位誤差較小,基本上可滿足一般的應用要求。若要應用于對定位精度要求較高的場合,可以考慮采用定位精度更高的GPS模塊等措施。
4 結 語
實驗結果表明,系統運行穩定、可靠,可以實現無距離限制的遠程定位。由于采用了虛擬串口技術,所以以較少的資源實現了GPS/GSM遠程定位技術,該定位技術可以應用于進行遠程定位的多種領域。但是,由于作為定位數據傳輸網絡的GSM網絡的固有問題,對系統的實時性有一定的影響。比如,有時會出現收發短消息延時的問題,特別是在網絡擁擠的時候,有時還存在較小區域的通信盲區,可以考慮與運營商建立一條專用短消息傳輸通道來保證遠程定位信息的可靠傳輸。相信隨著定位技術、通信技術以及GIS技術的不斷發展,本文所討論的遠程定位技術將會得到廣泛的應用。