
摘? 要: 移動終端" title="移動終端">移動終端的位置是移動互聯網中的關鍵信息。本文從移動定位技術" title="定位技術">定位技術的基本概念、分類方法、移動通信網中的定位技術等方面對其進行了闡述。
關鍵詞: 移動互聯網? 定位技術? 移動通信
?
移動終端的位置信息" title="位置信息">位置信息是移動互聯網中的關鍵信息,利用移動定位信息開展的服務將是移動互聯網上的一種特色服務。獲取移動定位信息的定位技術及其定位系統" title="定位系統">定位系統已經成為當前的研究熱點。
1 移動定位的基本概念
移動定位涉及計算機科學技術、數學和移動無線通信技術等多個學科的知識,某些有關移動定位的基本概念比較容易混淆,因此有必要首先澄清一些基本概念[1]。
1.1 物理位置信息和抽象位置信息
定位系統提供的位置信息可以分為兩類:物理意義上的位置信息和抽象意義上的位置信息。所謂物理意義上的位置信息,就是指被定位物體具體的物理或數學層面上的位置數據,例如,GPS可以測得一幢建筑位于北緯50°47’21”,東經110°56’49”,海拔20.3米。相對而言,抽象的位置信息可以表達為:這棟建筑物位于公園的小樹叢中或校園的主教學樓附近等等。
從應用程序的角度講,不同的應用程序需要的位置信息抽象層次也不盡相同,有些只需要物理位置信息;而有些則需要抽象意義上的位置信息,單純的物理位置信息對它們來說是透明的,或是沒有意義的。當然,物理位置信息可以在附加信息庫的幫助下,轉換并映射為抽象層次的位置信息,在這里,附加的信息庫往往是外部提供的數據源。
不同的定位系統可以提供的位置信息抽象層次也不同。GPS是一種典型的可以提供物理位置信息的定位系統;而移動通信網絡中普遍使用的CellID定位只能告訴應用程序被定位物體當前所在的蜂窩小區ID號。
1.2 相對位置和絕對位置
定位系統提供的位置數據還有相對和絕對之分。在這里,相對和絕對的概念與物理學中的相對和絕對的概念類似。絕對位置是指在同一個參照系前提下的位置,例如,所有的GPS接收設備所提供的經度、緯度、海拔等數據都是基于同一個參照系的,在同一地理位置的兩個GPS接收設備顯示的位置信息是相同的。
而相對位置是在不同的參照系中得出的,每一個物體都可能有自己的參照物。處于相同地理位置的物體因為對應的參照物不同,位置數據的讀數也可能不同。
1.3 定位精度" title="定位精度">定位精度和定位準確度
定位精度和定位準確度是兩個緊密聯系的概念,它們之間的關系類似于數理統計學中置信區間和概率之間的關系。嚴格說來,如果孤立的指出某個定位系統的定位精度或定位準確度,都是沒有意義的。典型的正確描述應該是:A定位系統可以在95%的概率下達到10m的定位精度。其中,“95%”描述的是定位準確度。定位精度越高,相應的定位準確度就越低,反之亦然。
不同的應用程序對定位精度往往有著自己特殊的、明確的要求(而忽略或含糊其詞對定位準確度的要求)。例如,老人或兒童監護需要的定位精度為500m以內,而某些室內的應用則可能需要厘米級的定位精度。美國聯邦通信委員會(FCC,Federal Communications Commission)則同時對定位精度和準確度作出了明確的規定:FCC要求在2001年10月1號以前所有的“911”呼叫定位服務需要精確到125米,而且準確率要達到67%。
通過增加定位設備的密度或綜合使用多種不同的定位技術,可以同時提高定位系統的精度和準確度。一般說來,室內應用需要的定位精度要比室外應用高。
1.4 基于移動終端的定位和基于網絡的定位
從定位策略的角度來看,定位技術/系統可以分為基于移動終端的定位和基于網絡的定位兩種。基于移動終端的定位是指定位計算是由移動終端自己完成的,移動終端可以自行確定自己當前的位置。這種定位策略也稱為移動終端的自定位,在蜂窩網絡中又叫做前向鏈路定位。基于移動終端的定位系統便于保護移動終端用戶的隱私(這里的隱私是指用戶當前的位置信息)不受侵犯,但是要求移動終端有較強的計算能力和持久的供電能力。基于網絡的定位主要由網絡系統收集待定位移動終端的信息并計算移動終端的當前位置。這類定位策略在蜂窩網絡中又叫做反向鏈路定位。前一種定位策略需要在用戶終端中植入智能,而后者則需要在網絡設備中植入智能并計算獲得位置信息。基于網絡的定位系統要求待定位移動終端發送或廣播一些特定的信號,網絡系統負責收集這些信號,并擔負起定位計算的任務。在實際應用中,通過一些策略控制,基于網絡的定位系統也可以有效的保護用戶的隱私。
如果再對以上的兩種定位策略進行細分,前一種定位策略又可以分為基于移動終端的定位(Handset-based location)和網絡輔助定位(Network-assisted location)兩種;而后一種定位策略又可以分為基于網絡的定位(Network-based location)和移動終端輔助定位(Handset-assisted location)兩種。其中網絡輔助定位是由網絡端輔助移動終端進行定位測量并由移動終端進行定位計算的定位;移動終端輔助定位是指由移動終端輔助網絡端進行定位測量并由網絡端進行定位計算的定位。
其他評價和區分定位系統的因素還有覆蓋范圍、成本、可否對定位物體進行自動識別等,這里就不贅述了。
2 移動定位技術的分類
定位技術大致可以分為三種類型:基于三角關系和運算的定位技術、基于場景分析的定位技術和基于臨近關系的定位技術。
2.1 基于三角關系和運算的定位技術
這種定位技術根據測量得出的數據,利用幾何三角關系計算被測物體的位置,它是最主要的、也是應用最為廣泛的一種定位技術。基于三角關系的定位技術可以細分為兩種:基于距離測量的定位技術和基于角度測量的定位技術。
2.1.1 基于距離測量的定位技術
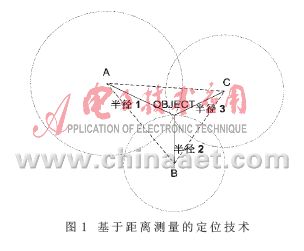
如圖1所示,這種定位技術先要測量已知位置的參考點(A,B,C三點)與被測物體(OBJECT)之間的距離(Radius1,Radius2,Radius3),然后利用三角知識計算被測物體的位置。一般來說,如果要計算被測物體的平面位置(即二維位置),那么需要測量三個非線性的距離數據;同理,如果要計算被測物體的立體位置(即三維位置),那么需要測量四個非線性的距離數據。在具體的應用環境下,需要測量的距離數據數目可能要少一些。例如,在Active Bat[2]定位系統中,參考點總是位于被測物體之上,所以只需要測量三個距離數據就可以確定Bat(被測物體)的三維位置。具體說來,距離測量的方法有三種:
?
(1)直接測量方法
這種方法通過物理動作和移動來測量參考點與被測物體之間的距離。例如,機器人移動自己的探針,直到觸到障礙物,并把探針移動的距離作為自己與障礙物之間的一個距離參數。
(2)傳播時間測量方法
在已知傳播速度的情況下,無線電波傳播的距離與它傳播的時間成正比。這種測量方法需要注意的問題有如下幾個:
·無線電波的傳播特性。
因為無線電波在傳播的過程中可能會發生反射,而測量端無法區分直接到達的無線電波和經過反射到達的無線電波,所以 容易造成測量的誤差。一般的解決方法是多測幾次,求出統計意義上的測量值。
·時鐘精度。
因為無線電波的傳播速度很快,所以為了減小測量誤差必須使用高精度的時鐘。
·時鐘同步。
參與同一個定位過程的參考點之間必須保證時鐘的同步,這樣才能保證測量結果的正確性和精度。如果由被測物體自己進行測量,那么被測物體和參與同一個定位過程的參考點必須保證時鐘的同步;如果采用測量往返時間的方法,那么只要測量端保證足夠的時鐘精度即可。
(3)無線電波能量衰減測量方法
已知發射電波的強度,在接收方測量收到的電波強度,以此估計出發射電波物體距離接收方之間的距離。例如,在理想的傳播環境下,無線電波的衰減與1/r2成正比(其中r為傳播距離)。實際上,無線電波在空間傳播時能量的衰減是多種因素共同作用的結果,而不單單與傳播距離有關。具體說來,在一個地形地物較為復雜的環境中,無線電波信號傳播時的衰減會受到反射、折射、多徑效應等多種因素的影響,所以這種利用能量衰減測量距離的方法不如傳播時間測量方法精度高。
2.1.2 基于角度測量的定位技術
基于角度的定位技術與基于距離測量的定位技術在原理上是相似的,兩者主要的不同在于前者測量的主要是角度,而后者測量的是距離。
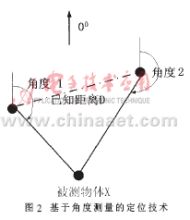
一般來說,如果要計算被測物體的平面位置(即二維位置),那么需要測量兩個角度和一個距離(虛線表示),如圖2所示。同理,如果要計算被測物體的立體位置(即三維位置),那么需要測量三個角度和一個距離。基于角度測量的定位技術需要使用方向性天線,如智能天線陣列。
?
2.2 基于場景分析的定位技術
這種定位技術對定位的特定環境進行抽象和形式化,用一些具體的、量化的參數描述定位環境中的各個位置,并用一個數據庫把這些信息集成在一起。觀察者根據待定位物體所在位置的特征查詢數據庫,并根據特定的匹配規則確定物體的位置。
由此可以看出,這種定位技術的核心是位置特征數據庫和匹配規則,它本質上是一種模式識別方法。Microsoft的RADAR[3]定位系統就是一個典型的基于場景分析的定位系統。
2.3 基于臨近關系的定位技術
基于臨近關系進行定位的技術原理是:根據待定位物體與一個或多個已知位置的臨近關系來定位。這種定位技術通常需要標識系統(Identification Systems)的輔助,以唯一的標識來確定已知的各個位置。
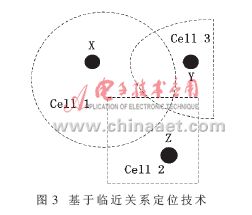
這種定位技術最常見的例子是移動蜂窩通信網絡中的CellID,如圖3所示。圖中以黑點表示的是三個待定位物體,它們分別位于三不同形狀的Cell中。因為各個Cell的位置是已知的,所以待定位物體的位置也就可以確定了。
?
基于臨近關系定位技術的應用非常廣泛,除了CellID以外,其他的例子還有Active Badge Location System[4]、Xerox ParcTAB System[5]、Carnegie Mellon Wireless Andrew等。
3 移動通信中的定位技術
移動通信中的定位技術通過對無線電波的一些參數進行測量,根據特定的算法來判斷被測物體的位置。測量參數一般包括無線電波的傳輸時間、幅度、相位和到達角等。定位精度取決于測量的方法。以下介紹的幾種定位技術可以分別歸類到上面提到的三類定位技術中。
3.1 CellID-TA
這種定位技術是CellID的改進。在移動蜂窩通信網絡中,每個蜂窩小區都有一個惟一的CellID,利用移動終端所在的CellID就可以粗略確定移動終端的位置。CellID又被稱為小區全球識別碼(CGI),CGI由位置區識別碼(LAI)和小區識別碼(CI)構成。
GSM系統中可以用作定位的另一個參數是時間提前量(TA)。TA是基站與移動終端之間的傳輸時延,BTS(基站收發子系統,Base station Transceiver Subsystem)通過測量TA可以估計與MS之間的距離。TA以比特為單位,1bit相當于550米的距離。
由于無線傳輸存在多徑效應,因此單純利用TA定位的精度很低。把CellID和TA結合在一起是一種既簡單又經濟的定位方法。
所有移動終端都可以使用CellID-TA進行定位,這是其一大優點。但是這種定位技術的定位精度取決于小區的大小和周圍的環境,通常只能用于粗略定位。
3.2 UL-TOA和TDOA
??? UL-TOA(Uplink Time Of Arrival,上行鏈路到達時間)定位方法是由基站測量移動終端信號到達的時間。該方法要求至少有三個基站參與測量,如圖4所示,每個基站增加一個位置測量單元LMU,LMU測量終端發出的接入突發脈沖或常規突發脈沖的到達時刻。LMU可以和BTS結合在一起,也可分開放置。由于每個BTS的地理位置是已知的,因此可以利用球面三角算出移動終端的位置。TDOA(Time Difference Of Arrival)測量的是移動終端發射的信號到達不同BTS的傳輸時間差,而不是單純的傳輸時間。
?

UL-TOA定位方法需要移動終端和參與定位的LMU之間精確同步,而TDOA通常只需要參與定位的LMU之間同步即可。另外,這兩種定位方法還要求在所有基站上安裝監測設備LMU,因此成本較高。
3.3? E-OTD
增強型觀察時間差E-OTD(Enhanced Observed Time Differential)在移動通信網絡中的多個基站上放置位置接收器或參考點,并把這些參考點作為位置測量單元(LMU)。每個參考點都有一個精確的定時源。當具有E-OTD功能的移動終端收到來自至少3個LMU的信號時,每個LMU到達移動終端的時間差就可以計算出來,利用這些時間差值產生的交叉雙曲線就可以估計出移動終端的位置。
與E-OTD相關的基本量有三個:觀察時間差OTD、真實時間差RTD和地理位置時間差GTD。OTD是移動終端實際觀察到的兩個BTS信號到達的時間差;RTD是兩個BTS之間的系統時間差;GTD是兩個BTS到移動終端由于距離差而引起的傳輸時間差。
設d1為BTS1與MS之間的距離,d2為BTS2與MS之間的距離,則GTD=|d2-d1|/v,公式中的v為無線電波的傳播速度。上述三個量之間關系為:OTD=RTD+GTD。當BTS都同步時,則RTD=0。
E-OTD要取得正確的定位結果,必須具備至少三個分別位于不同地理位置的BTS。另外,參與定位的BTS之間必須實現時鐘同步。最常用的同步方法是在BTS上安裝固定的GPS接收機。E-OTD還會受到市區中多徑效應的影響。這時,多徑效應將扭曲信號的波形并加入延遲,導致E-OTD定位時的困難。
E-OTD方案可以提供比CellID高得多的定位精度——在50米到125米之間。但是它的定位響應速度較慢,往往需要約5秒的時間。另外,它需要對移動終端進行改進,這意味著現存的移動用戶無法通過該技術獲得基于位置的服務。
3.4 AOA
信號到達角(AOA,Angle Of Arrival)定位方法是由兩個或更多基站通過測量接收信號的到達角來估計移動終端的位置,如圖5所示。AOA方法通常用來確定一個二維位置。
?
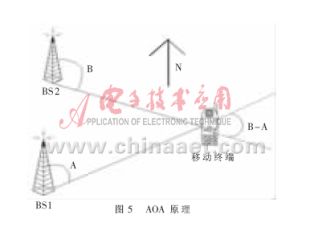
移動終端發,BTS1收,測量可得一條BTS1到移動終端的連線;移動終端發,BTS2收,測量得到另一直線,兩直線相交產生定位角。BTS1和BTS2坐標位置已知,以正北為參考方向,順時針為+0~+360度,逆時針為-0~-360度,由此可獲得以移動終端、BTS1和BTS2為三點的三角關系。AOA方法在障礙物較少的地區可以獲得較高的定位精度,但在障礙物較多的環境中,由于無線傳輸存在多徑效應,則誤差增大。另外,AOA技術必需使用智能方向天線。
3.5 信號衰減(Signal Attenuation)
這種定位技術利用移動終端靠近基站或遠離基站時引起的信號衰減變化來估計移動終端的位置,又被稱為場強定位技術。由于多數移動終端的天線是多向發送的,因此信號功率會向所有方向迅速消散。如果移動終端發出的信號功率已知,那么在另一點測量信號功率時,就可以利用一定的傳播模型估計出移動終端與該點之間的距離。
然而,測定對方的傳送功率是一項沉重的負擔,由于小區基站的扇形特性、天線有可能傾斜以及無線系統的不斷調整,這個測定過程可能會十分復雜。而且,信號并不只因為傳輸距離而產生衰減,其它因素(如穿越墻壁、植物、金屬、玻璃、車輛等)都會對信號功率產生影響。另外,功率測量電路無法區分多個方向接收到的功率,例如直接到達的信號功率和反射到達的信號功率。因此,根據信號衰減進行定位被認為是定位技術中最不可靠的一種。
4 移動定位技術當前的研究熱點
(1)提高移動定位系統的定位精度和準確度
移動定位的定位精度和定位準確度是衡量移動定位系統性能的重要指標,因此在可接受的定位成本的條件下,如何提高定位系統的定位精度和定位準確度是當前的一個研究熱點。
(2)移動定位信息的獲取和處理
移動定位信息是基于位置的移動應用所必需的關鍵信息。不同的移動應用對定位信息的要求也是不同的。因此需要一個中間層對移動定位系統收集的定位信息進行進一步的處理,以滿足移動應用對定位信息不同的要求。這里所說的中間層是一個中間件性質的軟件實體,它的作用是屏蔽底層的具體的移動定位技術,向移動應用提供特定的定位服務。
(3)移動定位應用的研究
有了可以提供足夠定位精度和準確度的定位技術,以及對移動定位信息進行收集和處理的移動定位中間件,應用程序設計人員的任務就是設計新穎的移動定位應用,推動移動互聯網的發展。
?
參考文獻
1 Jeffrey Hightower,Gaetano Borriello. Location Systems for Ubiquitous Computing”,IEEE Computer, Aug, 2001, pp. 57~66
2 A. Harter et al., The Anatomy of a Context-Aware?Application, Proc. 5th Ann. Int'l Conf. Mobile Computing?and Networking (Mobicom 99), ACM Press, New York,?1999, pp. 59~68
3 P. Bahl and V. Padmanabhan.RADAR: An In-Building? RF-Based User Location and Tracking System, Proc.IEEE
? Infocom 2000, IEEE CS Press, Los Alamitos,Calif., 2000,?pp. 775~784
4 Roy Want, Andy Hopper, et al. The active badge location system. ACM Transactions on Information Systems,10(1):91-102, January 1992.
5 Roy Want, Bill Schilit, et al. The parctab ubiquitous?computing experiment. In Tomasz Imielinski, editor,Mobile?Computing, chapter 2,pages 45-101. Kluwer Publishing,?February 1997. ISBN 0-7923-9697-96