
1.概述[1]
傳統的PWM控制技術多用于兩電平電路的驅動控制,其主要方法是正弦脈寬調制(SPWM),調制波為正弦波,依靠三角載波和調制波的比較得出交點實施控制,其電壓利用率低,諧波含量大。而隨著微處理器技術的發展和多電平電路的出現,涌現出很多新的控制方法,如優化PWM方式、滯環電流控制方式、空間電壓矢量控制" title="矢量控制">矢量控制方式等等。其中,空間電壓矢量控制通過合理地選擇、安排開關狀態的轉換順序和通斷持續時間,改變多個脈沖寬度調制電壓的波形寬度及其組合,達到較好的控制。相對SPWM控制,具有電壓利用率高、諧波含量小、大大改善了系統的靜態和動態性能,具有結構簡單、容易實現、控制精度高等特點。本文采用空間矢量控制的控制策略,并對整流電路采用電壓外環PI和電流內環PI控制相結合的方法,建立三相電壓型" title="電壓型">電壓型PWM矢量控制方案的仿真模型" title="仿真模型">仿真模型,并對其進行分析研究。
2.三相電壓型PWM整流器控制方案[2 3 4]
圖1為三相電壓型PWM整流器空間矢量控制框圖,它由主電路" title="主電路">主電路和控制回路兩部分組成。其中,控制回路主要由輸入電流和輸出電壓檢測、坐標變換" title="坐標變換">坐標變換、PI控制器和SVPWM脈沖產生等部分組成。其原理如下:三相交流電通過三相電壓型整流電路整流為穩定的直流電壓" title="直流電壓">直流電壓。同時,控制回路對主電路的輸入電流和輸出直流電壓進行檢測,一方面,將檢測值 與給定值 進行比較后送入PI控制調節器,輸出值與電流 比較并將其輸出送入PI控制器變為電壓信號,再經坐標變換送入SVPWM脈沖產生單元,完成電壓閉環控制;另一方面,將檢測的輸入電流經坐標變換與給定電流 比較,送入PI控制器變為電壓信號,再經坐標變換送入SVPWM脈沖產生單元,完成電流的閉環控制。矢量控制單元通過矢量運算,生成所需要的PWM波,控制雙向變換器,達到輸出電壓的穩定和輸入側交流電流的正弦化。

圖1 三相電壓型PWM空間矢量控制方框圖
控制系統框圖中的PI控制模塊、坐標變換模塊和矢量控制模塊的工作原理參考文獻1,其具體參數需要在仿真中確定。
3.空間矢量控制的PWM整流器仿真模型建立和分析
3.1仿真模型的建立[4 5]
利用Matlab/Simulink軟件包,根據控制框圖建立仿真模型。仿真模型主要包括主電路模型、控制電路模型和功率因數計算模型等。
(1) 主電路模型
主電路仿真模型如圖2所示。它主要由輸入電源模塊、三相整流器模塊和一些電壓、電流測量單元組成。
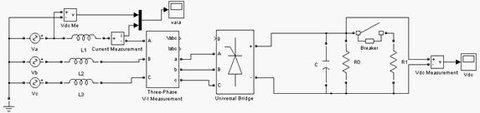
圖2主電路模型
(2)控制電路模型

圖3控制電路模型
控制電路仿真模型如圖3所示。它主要由PI控制器模型、坐標變換模型以及矢量控制器模型等部分組成。其中,坐標變換和矢量控制器仿真模型的建立主要根據矢量控制原理搭建而成[2],其仿真模型如圖4所示。
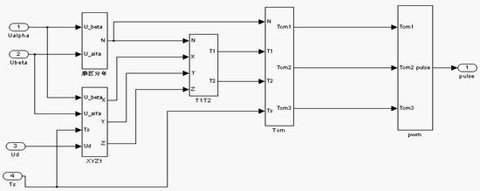
圖4 SVPWM仿真模型
(3)功率因數計算模型

圖5 功率因數計算模型
3.2仿真結果
根據上面搭建的仿真模型,給定仿真參數假定如下:交流側輸入為三相260V交流電壓,交流側電感取3.4mH,直流側濾波電容為1000µf,給定直流輸出電壓為650V,開關頻率10KHZ,負載電阻為40Ω。在t=0.05s時,突加負載使負載電阻由40Ω變為20Ω。仿真結果如下所示。
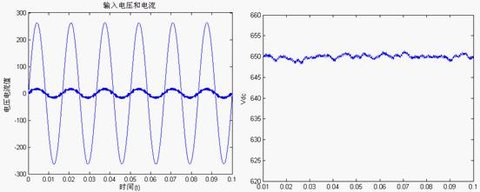
輸入a相電壓和電流穩態波形 圖7 輸出直流電壓穩態波形
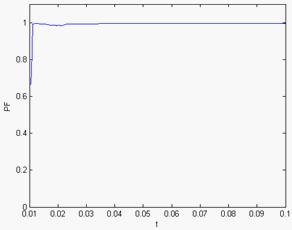
圖8 功率因數響應曲線

輸入電流隨負荷波動曲線 10 輸出直流電壓隨負荷波動曲線
4.結束語
根據電壓空間矢量控制的基本概念和控制框圖,建立三相電壓型PWM整流器空間矢量控制的仿真模型,并對每個模塊進行詳細的分析。從圖6~圖8可以看出采用這種控制方案輸出直流電壓響應速度快,輸入交流側電流波形為正弦波且與輸入交流電壓相位相同,基本實現了單位功率因數。另外從圖9和圖10可以看出,當突加負載時,整流器輸入側電流幅值變大并有少許的波動,但很快就恢復為正弦波,同時輸出側直流電壓降低,但很快也恢復到給定的650V直流電壓。通過仿真結果可以看出采用空間矢量控制的整流器具有很好的動態特性和穩定性。