

引言
近幾年來,隨著電力電子器件和現代控制理論的迅速發展,無刷直流電動機" title="無刷直流電動機">無刷直流電動機由于沒有接觸式換向裝置,不存在換向引起的火花,其具有效率高,轉速不受機械換向所限制,可維護性強,安全性高等諸多優點,而被人們廣泛應用于光驅、智能機器人、電動交通工具等領域。DSP(數字信號處理器)則以其高速的數據處理能力、豐富的內部資源、集成度高和功耗低等特點,已廣泛應用在控制領域中。本文提出了一種基于DSP的無刷直流電機控制系統" title="控制系統">控制系統的設計方案。該設計結合模糊控制方法來實現無刷直流電動機的智能化控制。
1 無刷直流電機的數學模型" title="數學模型">數學模型
根據物理學公式,單根導體在磁場中切割磁力線運動時,所產生的電動勢e為:
![]()
式中,B為磁場感應強度,l為磁場中導體的有效長度,v為導體垂直于磁力線運動的線速度。在電機中,v與轉速n的關系為:
![]()
這樣,無刷直流電機在運行過程中所感應產生的感應電動勢大小為:
![]()
式中,E為無刷直流電動機產生的感應電動勢;p為電機的極對數;α為極弧系數;W為點數繞組每一相的繞線匝數;ψ為每一極的磁通量;n為電機的轉速。
假設無刷直流電動機的繞組采用三相星型結構,定子三相完全對稱,空間上互差120°的電角度,三相繞組電阻的電感量參數相同。同時忽略電樞繞組之間產生的互感,電機的氣隙磁導均勻,磁路不飽和,并忽略渦流損耗。則無刷直流電動機的數學模型如下:
式中,Va、Vb、Vc分別為三相端壓;R為三相繞組電阻;L為三相繞組電感;Ea、Eb、Ec分別為電動機的三相感應電勢;ia、ib、ic分別為三相繞組流過的電流。這樣,其電磁轉矩的表達式可以表示為:
而根據運動學定律。電磁轉矩的表達式也可以表示為:
![]()
式中,T1為電動機的負載轉矩,J為轉子的轉動慣量,Z為電機轉動的阻尼系數。
2 系統硬件設計
2.1 系統總體硬件設計
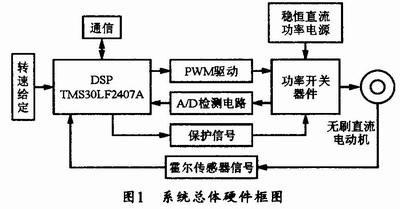
本系統大致可分為功率驅動部分、DSP控制核心部分、A/D信號檢測部分等,圖1所示是一個基于DSP的直流無刷電機控制系統的總體硬件系統框圖。
2.2 功率驅動部分設計
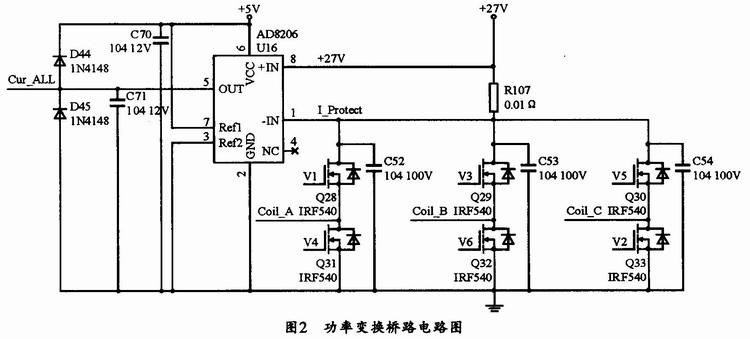
圖2所示是本文所介紹的三相無刷直流電機的功率變換橋路" title="橋路">橋路電路圖。圖中共使用了6個N溝道的MOSFET功率元件IRF540,可構成三相橋路以作為無刷直流電機的電子換相器,其完成的功能與傳統的有刷直流電機的換相器的功能一致。電阻R107作為過電流保護功能的采樣電阻" title="采樣電阻">采樣電阻。其實是一個小型的錳銅分流器,取值0.01Ω,可保證平時在正常工作電流以及額定啟動電流通過電阻時,不會產生大的電壓,而當電機堵轉、某處短路或者上下MOSFET同時導通短路時,該電阻則可產生大電流,當在此電阻上的壓降達到一定程度時,電路可迅速激活過電流保護電路以停止所有MOSFET的工作,同時斷開主電路電源,防止事態進一步惡化。
2.3 DSP部分設計
根據對電機數學模型進行的分析。為實現對無刷直流電機轉速的高精度可靠控制,本系統采用T1公司成熟的DSP產品TMS320LF2407。該數字信號處理器不但具有高速信號處理和數字功能所必需的體系結構的特點,而且其低成本、低功耗及高性能的處理能力以及豐富的內部資源,也對電機的數字化控制非常有用,此外,該數字信號處理器(DSP)內部還自帶高精度10位ADC模數轉換模塊和脈沖調制PWM模塊。
2.4 A/D信號檢測設計
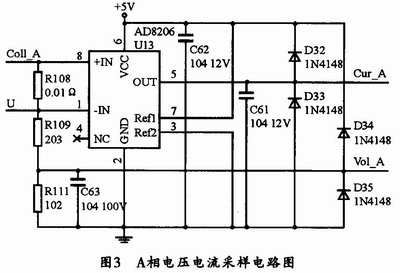
通過專用高端電流測量芯片AD8206以及高精度采樣電阻可以完成對A/D信號的檢測功能。即由三相功率變換橋路引出的Coil_A、Coil_ B、Coil_C分別經過高精度超低阻值的0.01Ω采樣電阻后,將引出U、V、W三線分別接至定子電樞的A、B、C三相線圈上,這樣即可通過檢測采樣電阻之上的電壓來檢測出各相電樞繞組上通過的電流。測試每相相對于地電壓的方法比較簡單,可以用電阻分壓法測試,A、B、C三相線圈上的電壓在U、V、W測試點上也可采用電阻分壓的方法得到,圖3所示是A相電壓電流的采樣電路。
3 系統軟件設計
3.1 系統控制總圖
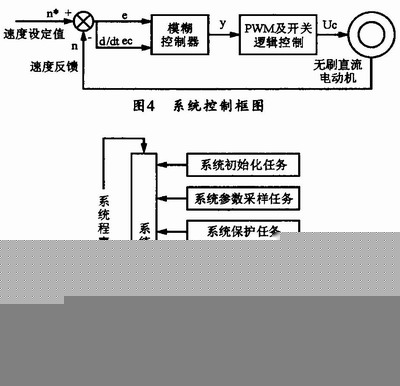
圖4所示是本系統的控制框圖。根據該控制框圖可將系統劃分為若干個子任務。其中包括系統初始化任務、系統參數采樣任務、系統保護任務、模糊控制計算任務、電機控制任務、通信任務等。任何時刻都只能有一個子任務被系統調度選中而進入系統的主循環中運行,此時,其他任務都處于休眠或者掛起狀態。以等待系統的調用。每一個子任務都是以一個死循環的函數形式出現并供系統調用,每個子任務的死循環的打斷和切換一般都以系統節拍時鐘為準。由系統調度器決定的、合適下一個應該調用的子任務框圖如圖5所示。
3.2 模糊控制參數的選擇
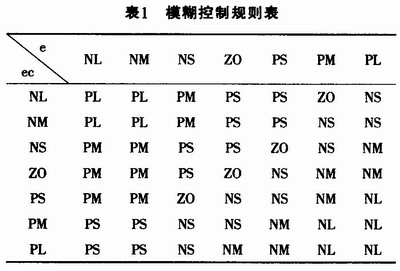
本模糊控制器以電機的轉速輸出與期望的速度輸出的偏差e以及偏差的變化率ec作為輸入變量來輸出電機的控制值的變化值。在模糊控制區內,可將速度偏差和偏差變化率量化為7個模糊子集,即模糊語言變量{負大,負中,負小,零,正小,正中,正大},簡記{NL,NM,N-S,ZO,PS,PM,PL}。
綜合考慮速度偏差和速度偏差變化率這兩個信號,可采用如下的模糊推力規則:
![]()
由于e和ec各有一個模糊子集,所以,共有49條模糊規則,其具體規則如表1所列。
3.3 系統參數采樣
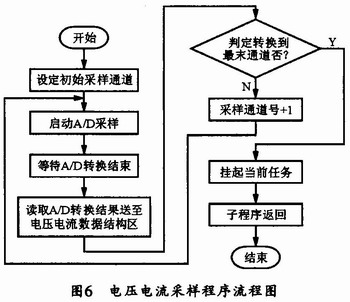
電壓電流采樣單元共采集7個數據,分別是三相電壓、三相電流和定子電樞總電流,這些參數分別對應A/D中的7個采樣通道。每一次采樣過程中。程序均按照采樣通道一次性順序采樣7個數據,并將采樣結果放入數據緩沖區,以供其他程序讀取和調用。假如被控電機的最高轉速為3000轉/分,即50轉/秒,且每一個電周期中有6個換相區間,那么,為了保證換相控制精度<15°,每個換相區間采樣5次。則可得到的每秒采樣次數為5x6x50=1500次/秒,每次采樣間隔時間大約為660μs。圖6所示是系統的電壓電流采樣程序流程圖。
4 系統仿真模型
仿真可利用Matlab軟件中的Simulink功能來完成。Simulink是一個可進行動態系統建模、仿真和綜合分析的集成軟件包。它可以處理的系統包括線性、非線性系統的離散、連續及混合系統單任務、多任務離散事件系統。圖7所示是一個無刷直流電機本體的仿真模型。

5 結束語
本文在分析了無刷直流電機數學模型的基礎上,提出了一種基于TMS320LF2407A的永磁無刷直流電機控制系統的解決方案。該方案充分利用DSP的強大運算功能和豐富的內部資源。并將模糊控制算法引入到控制系統中。仿真結果表明:該系統的控制波形符合理論分析,整個系統運行平穩,具有較好的靜、動態特性。