
引 言
電力系統運行的穩定性是電力系統安全運行的基本要求,而對同步發電機勵磁的控制是改善電力系統運行穩定性的一個經濟和有效的手段。通過對發電機勵磁施加適當的控制,可以改善電力系統在大小擾動下的穩定性[1-3]。以往勵磁控制器設計通常是基于運行點的線性化方法所得,將電力系統近似作為一個線性化系統進行處理。但是電力系統的非線性決定了這種方法的局限性。基于微分幾何理論的狀態反饋精確線性化方法被引入發電機勵磁控制系統設計[6],但是這種方法需要復雜的微分幾何數學工具,作為改進,文獻[7-9]提出基于直接反饋線性化理論的非線性勵磁控制器。本文提出一種基于輸入對狀態反饋線性化的非線性勵磁控制器,這種方法實用方便,容易理解。本文對這種新型的勵磁控制器進行詳細的仿真研究,仿真結果證明這種非線性勵磁控制器對于提高電力系統在大小擾動下的穩定性有一定作用。
2 輸入對狀態反饋線性化理論簡述
對于給定單輸入仿射非線性系統:

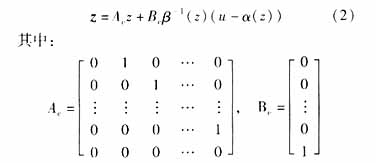
系統(1)能夠被輸入對狀態反饋線性化的條件是:系統具有相對度(relative degree)r=n,其中n為系統的階數。若非線性系統(1)能夠被輸入對狀態反饋線性化。則在一個鄰域Ω Rn中存在一個微分同胚T:Ω→Rn,在新的坐標變換下z=T(x)下,系統可以轉化為:
Rn中存在一個微分同胚T:Ω→Rn,在新的坐標變換下z=T(x)下,系統可以轉化為:
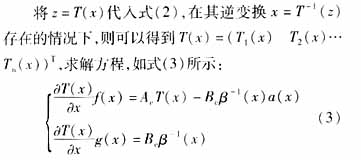
同時可得到a(x),B(x)的表達式,如下(4)式所示。
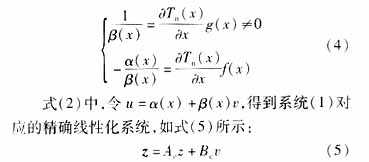
式(5)是一線性化系統,所以其控制規律可以完全按照線性系統的方法來設計。
3 非線性勵磁控制設計
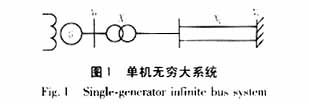
所要研究的系統如圖1所示,發電機采用三階簡化模型,保持原動機功率不變,并且忽略摩擦阻尼的影響情況下,系統可用下面一組微分方程表示:
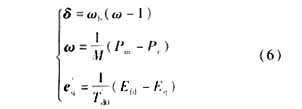
其中:δ為發電機功角,Wb=2πf,W為發電機角頻率,Pm為原動機功率,Pe為發電機電磁功率,e′q為暫態電勢,Efd為勵磁電壓,Eq為空載電勢。M為慣性時間常數,T′do為勵磁繞組暫態時間常數。

系統方程可以寫成:

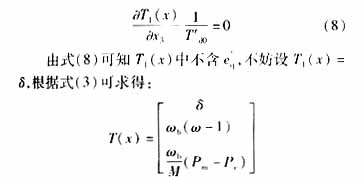
由于該系統可以實現輸入對狀態反饋線性化,所以存在可逆變換z=T(x)=(T1(x) T2(x) T3(x))T將系統轉換為(5)形式。由(3)可得:
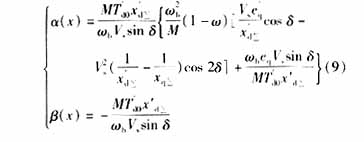
其逆變換T-1(z)存在。根據(4)式,可求得a(x)、β(x)
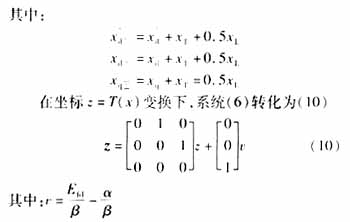
系統(10)為一線性系統,可以按照線性最優控制[10]設計控制量,控制量表達式如下式(11)所示:
可以證明,用輸入對狀態反饋線性化方法推導出的控制規律和用基于微分幾何理論的狀態反饋精確線性化方法以及用直接反饋線性化(DFL)方法推導出的控制規律一致[6][8][9],但本文的方法更簡單實用。
這樣控制量的計算只需要測量δ, W,Pe。
4 仿真結果
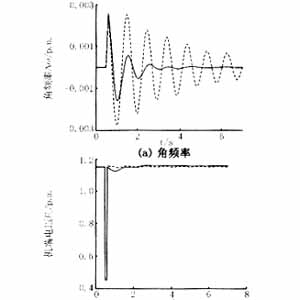
針對圖1所示系統,分別對系統發生(1)三相短路0.2s后切除故障;以及(2)切除一條線路運行3.5m后恢復雙回線路運行兩種擾動下的動態過程進行了仿真。仿真結果如圖2,圖3所示。

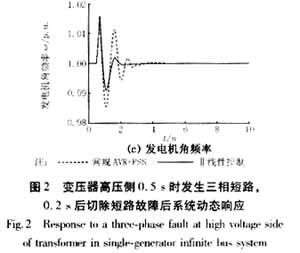

從圖2,圖3可以看出,本文提出的非線性勵磁控制器在系統發生擾動時,總是表現出比常規的AVR+PSS更好的阻尼特性,因此采用非線性勵磁控制器更能抑制系統在發生故障時的振蕩,對于增強系統穩定性有一定促進作用。
另外,本文對圖4所示五臺機電力系統進行了仿真研究,假定在No.3發電機出口端發生三相短路時,在No.3機上裝常規的AVR+PSS或者非線性勵磁控制器,考察多機系統的動態響應情況,仿真結果如圖5所示。
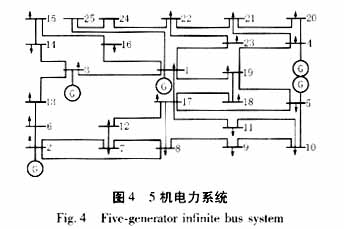

由圖5可以看出,當發電機裝上本文提出的非線性勵磁控制器后,在系統發生故障時,比起常規的AVR+PSS,能夠更快的平息振蕩。
5 結論
本文提出一種基于輸入對狀態反饋線性化理論的非線性勵磁控制器,所得的控制規律和用基于微分幾何理論的精確線性化思想推導出的控制規律具有一致性,但是本文的方法更簡單實用,利于工程應用。單機無窮大系統以及多機系統下的仿真結果證明,該非線性勵磁控制器和常規AVR+PSS相比,能夠更好抑制電力系統在大小擾動下振蕩,對于增強系統穩定性有一定作用。