
摘要:目前在導航接收系統中,通常需要控制盒來完成對機載設備的加電、工作頻率或波道的轉換、系統音量、顯示亮度等功能的操作與控制。文中介紹某導航控制盒的應用范圍、工作原理及電路實現,主要從頻率控制、關鍵器件HCMS2924點陣模塊的使用方法等方面進行了詳細的論述。
關鍵詞:BCD碼;頻率控制;ARINC 429總線;看門狗;E2PROM;LED點陣顯示
導航就是引導一個運動體從一點到達另一點的全過程。飛機導航的目的在于保證其從開始起飛到著陸全過程安全、有效、經濟的飛行。導航控制盒是機載導航設備的操作控制機構。本項目是基于ARINC 429總線數據格式的導航接收機的控制機構,ARINC429串行總線具有傳輸速率高,抗干擾能力強的特點,符合航空數字信息傳輸系統的要求。
該系統將導航接收機的所需的頻率以ARINC 429總線數據格式輸出,其中信號格式為BCD編碼格式,頻率范圍是108.00~117.95 MHz,頻率間隔50 kHz,通過它可以實現對設備的加電控制、可手動控制頻率或工作波道的轉換、可完成系統音量調節、顯示亮度的調節并顯示當前頻率,根據系統的控制要求,實現兩個分系統間控制盒的轉換與數據交換功能。
1 實現過程
1.1 控制盒的電路實現
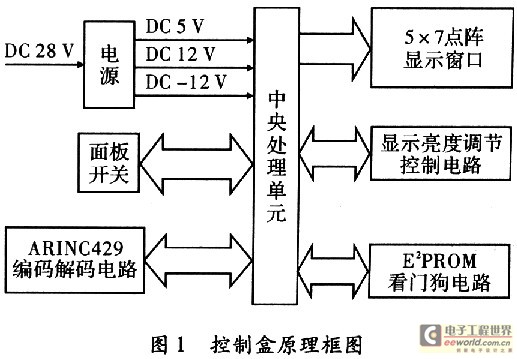
控制盒通過“按鈕”對頻率進行選擇,單片機在主程序中對按鈕的開關狀態進行掃描,根據掃描到的情況實現相應的頻率控制。在控制盒中應用了一個可編程看門狗E2PROM,防止萬一因強烈干擾而使CPU程序運行出錯時,它能在可編程的超時周期(200 ms)內使CPU復位,回到正常的程序狀態。單片機還可以讀取存貯于看門狗電路的頻率,使控制盒能記憶上次關機的工作狀態。顯示窗口的亮度可以調節。頻率顯示采用了5×7點陣模塊來顯示。單片機將頻率代碼轉換成BCD碼格式,通過ARINC429數據的格式,送到導航接收機。
原理框圖如圖1。
1.2 信號BCD碼在ARINC 429中的位置及格式

在發送ARINC 429數據時,首先把頻率數據轉換成BCD碼的格式,再進行相應的判斷和計算后保存到發送ARINC 429數據的數組里,最后循環發送出去。相反,在接收ARINC 429數據后,先保存在接收ARINC 429的數組里,然后進行計算判斷,如接收的數據正確,再把信號數據提取出來,進行相應的處理和顯示。
1.3 頻率的控制
控制盒剛開機時,記憶并顯示上次斷電時的頻率,此功能通過讀寫看門狗來實現。X25045是有4 kB的串行E2PROM,由一個用四線構成的SPI總線方式進行操作,其擦寫周期至少有l 000 000次,其特有的看門狗功能具有總線監控和電壓監控功能,具有良好的性能價格比。
頻率選擇采用按鈕輸入法,按MHz/kHz選擇按鈕,選擇M位或k位,被選擇位處于閃爍狀態,再按“↑”或“↓”按鈕,相應位的數據進行增減。當數據達到最大值時,再按“↑”按鈕,顯示頻率回到最小值。同樣,當數據達到最小值時,再按“↓”按鈕,顯示頻率回到最大值。M位時數據步進量為1 MHz,k位時數據步進量為50 kHz。在以上操作過程中,控制盒不發送ARINC429數據(即默認上一狀態),若5 s內沒有按以上提到的任何按鈕,控制盒開始發送現在顯示的頻率的ARINC429數據。
1.4 顯示模塊的電路實現
用2塊5×7 HCMS2924點陣模塊顯示108.00~117.95MHz范圍的頻率,該產品采用低功耗的CMOS工藝。它與TTL電平兼容,可以直接與微處理器和微控制器相連而無需接口電路和元件。該顯示屏的特點是可以在水平和垂直方向靈活組合,2塊點陣模塊的連接關系,如圖2所示。 P3.7、P2.6和P3.4口線分別控制HCMS2924的DIN端、CE端和RS端。首先,RS置低以選擇點陣寄存器,接著將CE也置為低。然后在每一個時鐘上升沿將數據從DIN移入點陣寄存器,移入的數據是高電平時,相應的點被點亮。當所有160位都被移入時,CE置高。當CLK的下降沿到來時,新的數據將被鎖存到顯示點陣驅動電路。待前面的數據顯示完成后,再將數據裝載進點陣寄存器。重復5×8×8次后,數據通過DIN端寫入到寄存器中。

在4 bit的顯示屏中,160位二進制數可由20列8行的矩陣構成。每個字符一般被定義成5×8的點陣,但8行中只有7行有LED點,第0行實際上從不顯示,如圖3所示。字符一般通過順序方式載入,首先被載入的是最左邊的數據,最后被載入的是最右邊的數據。
顯示亮度可以用軟件編程修改控制字的方法實現。該控制寄存器由兩個獨立的7位控制字(控制字0和控制字1)組成,由寄存器的D7位決定選擇哪一個控制寄存器,D7位為L時選擇控制字0,D7位為H時選擇控制字1。控制字0的D0~D3位通過脈寬調制(PWM)來調整顯示亮度,D4~D5位通過控制像素的峰值電流來調整顯示亮度,D6位選擇正常操作模式(D6=H)或睡眠模式(D6=L)。控制字1有兩個功能;D0位用于選擇串行/并行數據輸出模式;D1位用于外部振蕩器前定標。
1.5 部分子程序
接收和發送子程序如下所示。
1.5.1 從X25045接收1 bit

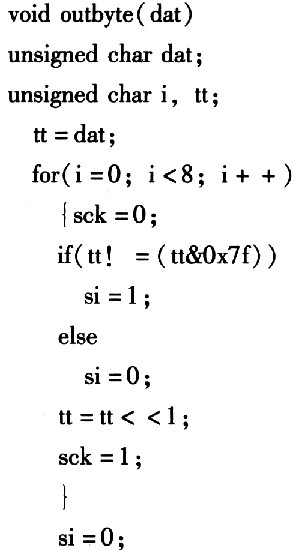
1.5.2 向X25045發送1 bit
2 導航控制盒的應用效果
該控制盒與原同類設備的控制盒相比較,有以下幾項優點:
(1)采用了先進的微處理機技術和數據存貯技術,使得產品具有功能強、操作方便、技術先進、可靠性高等特點;本次控制盒的頻率選擇功能通過軟件實現,原同類控制盒大多采用多層波段開關來實現頻率選擇,電路復雜且可靠性差。
(2)頻率顯示采用兩塊點陣模塊顯示,若按原控制盒的設計方法,完成同樣功能,則需要14個數碼管;
(3)鑒于以上兩點,該控制盒硬件電路簡化,重量是原來的1/2,體積減小到原來的2/3,這對于機載設備的減重及小型化有益。
3 結束語
文中闡述了控制盒的工作原理和軟硬件設計方案,設計思想新穎、結構簡明。將控制盒與系統連接進行了功能測試。結果表明該系統具有反應速度快、可靠性高、可維護性,較好地滿足了系統的工作要求,對需要實現此功能的同類控制裝置,具有一定的借鑒意義。